 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Optimization with Feedback Delay and Nonlinear Switching Cost
Oct 29, 2021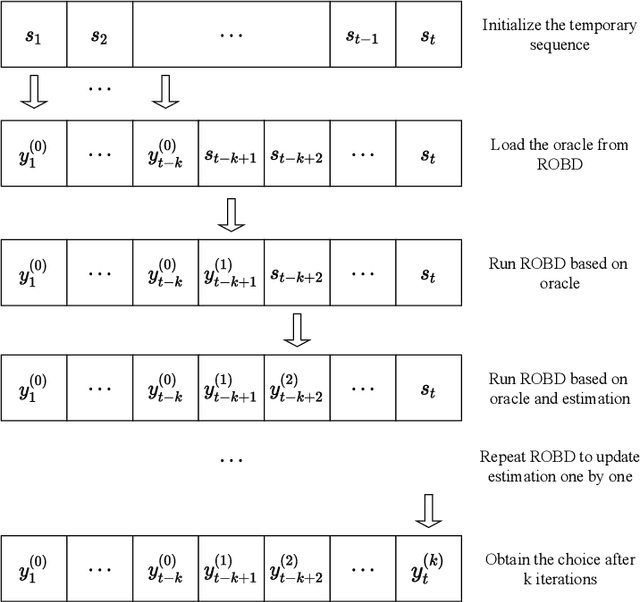
We study a variant of online optimization in which the learner receives $k$-round $\textit{delayed feedback}$ about hitting cost and there is a multi-step nonlinear switching cost, i.e., costs depend on multiple previous actions in a nonlinear manner. Our main result shows that a novel Iterative Regularized Online Balanced Descent (iROBD) algorithm has a constant, dimension-free competitive ratio that is $O(L^{2k})$, where $L$ is the Lipschitz constant of the switching cost. Additionally, we provide lower bounds that illustrate the Lipschitz condition is required and the dependencies on $k$ and $L$ are tight. Finally, via reductions, we show that this setting is closely related to online control problems with delay, nonlinear dynamics, and adversarial disturbances, where iROBD directly offers constant-competitive online policies.