 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Partially Overlapping Point Sets: an Inner Approximation Algorithm
Jul 05, 2020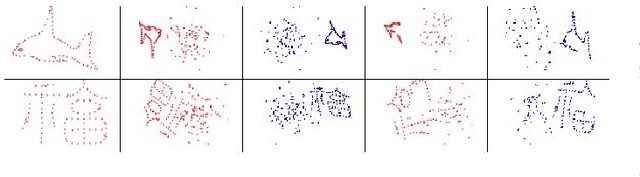

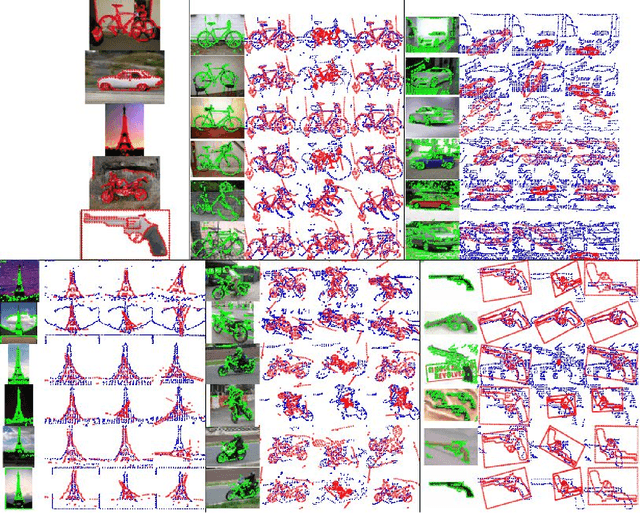
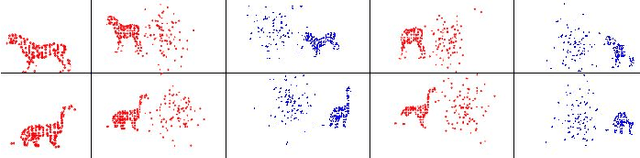
Aligning partially overlapping point sets where there is no prior information about the value of the transformation is a challenging problem in computer vision. To achieve this goal, we first reduce the objective of the robust point matching algorithm to a function of a low dimensional variable. The resulting function, however, is only concave over a finite region including the feasible region. To cope with this issue, we employ the inner approximation optimization algorithm which only operates within the region where the objective function is concave. Our algorithm does not need regularization on transformation, and thus can handle the situation where there is no prior information about the values of the transformations. Our method is also $\epsilon-$globally optimal and thus is guaranteed to be robust. Moreover, its most computationally expensive subroutine is a linear assignment problem which can be efficiently solved. Experimental results demonstrate the better robustness of the proposed method over state-of-the-art algorithms. Our method is also efficient when the number of transformation parameters is small.