 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePReP: Efficient context-based shape retrieval for missing parts
Oct 18, 2024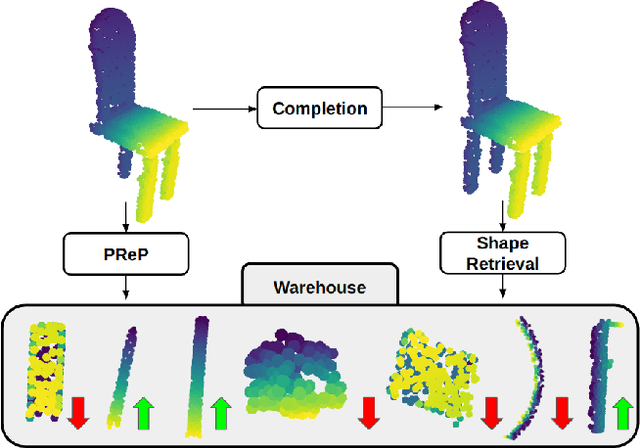
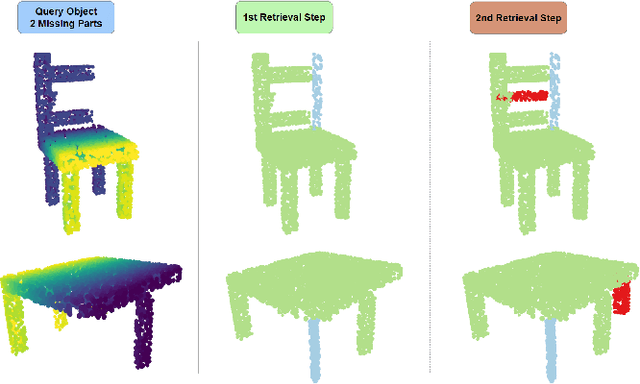
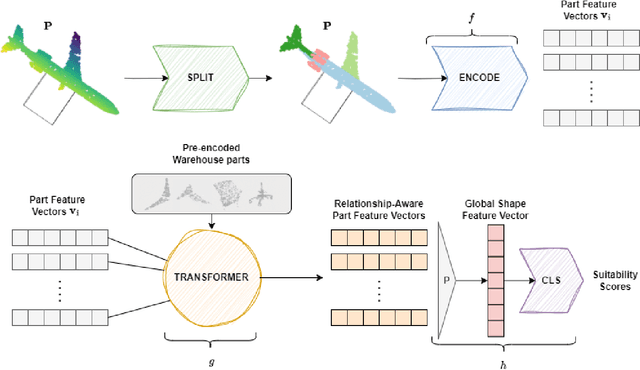
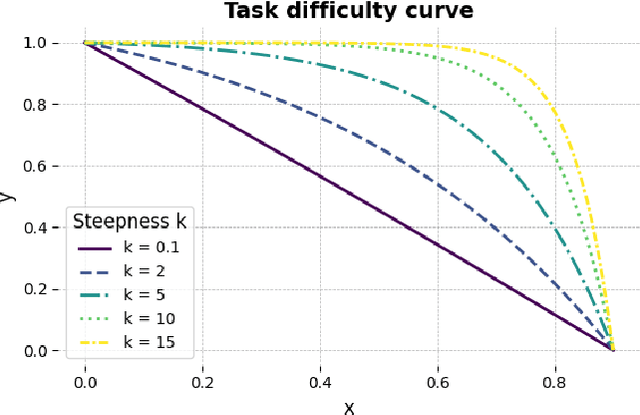
In this paper we study the problem of shape part retrieval in the point cloud domain. Shape retrieval methods in the literature rely on the presence of an existing query object, but what if the part we are looking for is not available? We present Part Retrieval Pipeline (PReP), a pipeline that creatively utilizes metric learning techniques along with a trained classification model to measure the suitability of potential replacement parts from a database, as part of an application scenario targeting circular economy. Through an innovative training procedure with increasing difficulty, it is able to learn to recognize suitable parts relying only on shape context. Thanks to its low parameter size and computational requirements, it can be used to sort through a warehouse of potentially tens of thousand of spare parts in just a few seconds. We also establish an alternative baseline approach to compare against, and extensively document the unique challenges associated with this task, as well as identify the design choices to solve them.
ExpPoint-MAE: Better interpretability and performance for self-supervised point cloud transformers
Jun 23, 2023



In this paper we delve into the properties of transformers, attained through self-supervision, in the point cloud domain. Specifically, we evaluate the effectiveness of Masked Autoencoding as a pretraining scheme, and explore Momentum Contrast as an alternative. In our study we investigate the impact of data quantity on the learned features, and uncover similarities in the transformer's behavior across domains. Through comprehensive visualiations, we observe that the transformer learns to attend to semantically meaningful regions, indicating that pretraining leads to a better understanding of the underlying geometry. Moreover, we examine the finetuning process and its effect on the learned representations. Based on that, we devise an unfreezing strategy which consistently outperforms our baseline without introducing any other modifications to the model or the training pipeline, and achieve state-of-the-art results in the classification task among transformer models.