 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimilarity-based Outlier Detection for Noisy Object Re-Identification Using Beta Mixtures
Sep 10, 2025Object re-identification (Re-ID) methods are highly sensitive to label noise, which typically leads to significant performance degradation. We address this challenge by reframing Re-ID as a supervised image similarity task and adopting a Siamese network architecture trained to capture discriminative pairwise relationships. Central to our approach is a novel statistical outlier detection (OD) framework, termed Beta-SOD (Beta mixture Similarity-based Outlier Detection), which models the distribution of cosine similarities between embedding pairs using a two-component Beta distribution mixture model. We establish a novel identifiability result for mixtures of two Beta distributions, ensuring that our learning task is well-posed.The proposed OD step complements the Re-ID architecture combining binary cross-entropy, contrastive, and cosine embedding losses that jointly optimize feature-level similarity learning.We demonstrate the effectiveness of Beta-SOD in de-noising and Re-ID tasks for person Re-ID, on CUHK03 and Market-1501 datasets, and vehicle Re-ID, on VeRi-776 dataset. Our method shows superior performance compared to the state-of-the-art methods across various noise levels (10-30\%), demonstrating both robustness and broad applicability in noisy Re-ID scenarios. The implementation of Beta-SOD is available at: https://github.com/waqar3411/Beta-SOD
Combining geolocation and height estimation of objects from street level imagery
May 14, 2023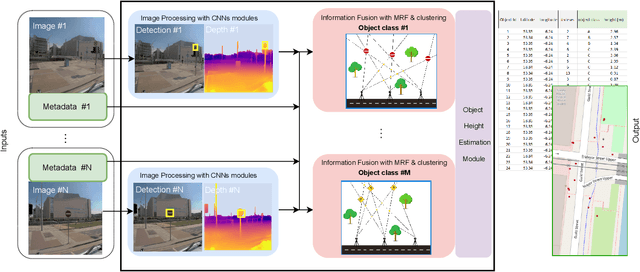
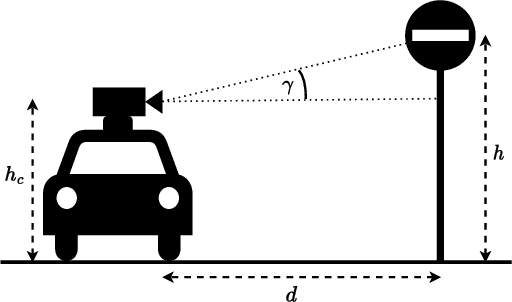
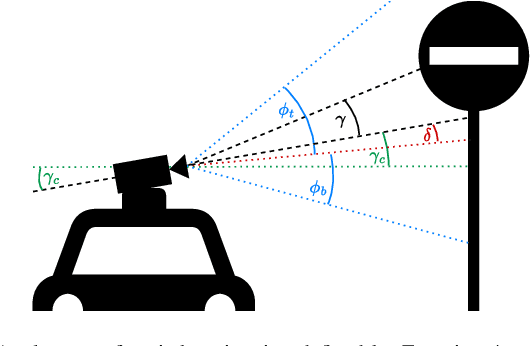
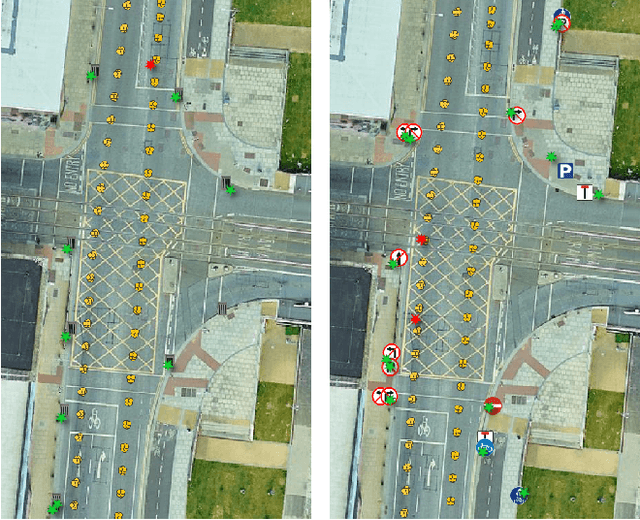
We propose a pipeline for combined multi-class object geolocation and height estimation from street level RGB imagery, which is considered as a single available input data modality. Our solution is formulated via Markov Random Field optimization with deterministic output. The proposed technique uses image metadata along with coordinates of objects detected in the image plane as found by a custom-trained Convolutional Neural Network. Computing the object height using our methodology, in addition to object geolocation, has negligible effect on the overall computational cost. Accuracy is demonstrated experimentally for water drains and road signs on which we achieve average elevation estimation error lower than 20cm.
Tensor Reordering for CNN Compression
Oct 22, 2020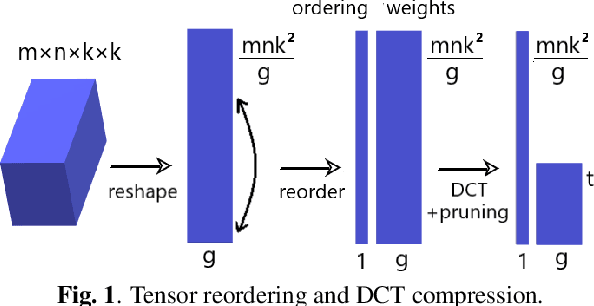
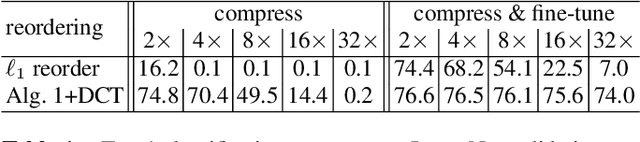
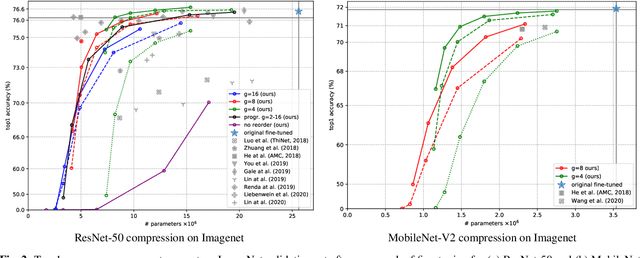
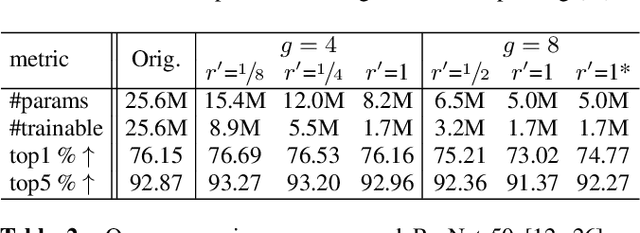
We show how parameter redundancy in Convolutional Neural Network (CNN) filters can be effectively reduced by pruning in spectral domain. Specifically, the representation extracted via Discrete Cosine Transform (DCT) is more conducive for pruning than the original space. By relying on a combination of weight tensor reshaping and reordering we achieve high levels of layer compression with just minor accuracy loss. Our approach is applied to compress pretrained CNNs and we show that minor additional fine-tuning allows our method to recover the original model performance after a significant parameter reduction. We validate our approach on ResNet-50 and MobileNet-V2 architectures for ImageNet classification task.
Harmonic Convolutional Networks based on Discrete Cosine Transform
Jan 18, 2020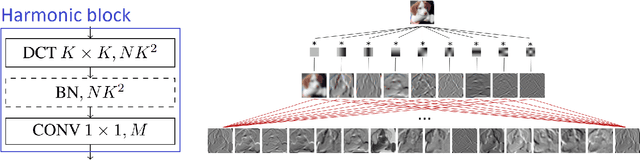
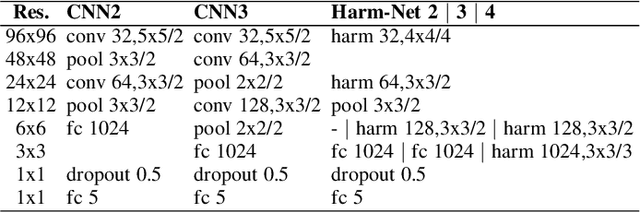
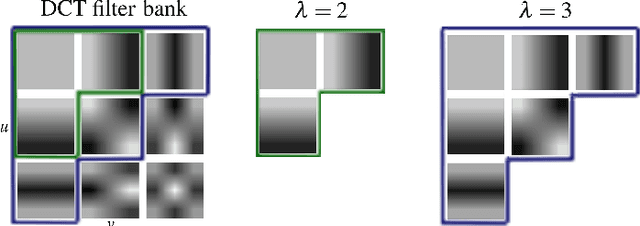
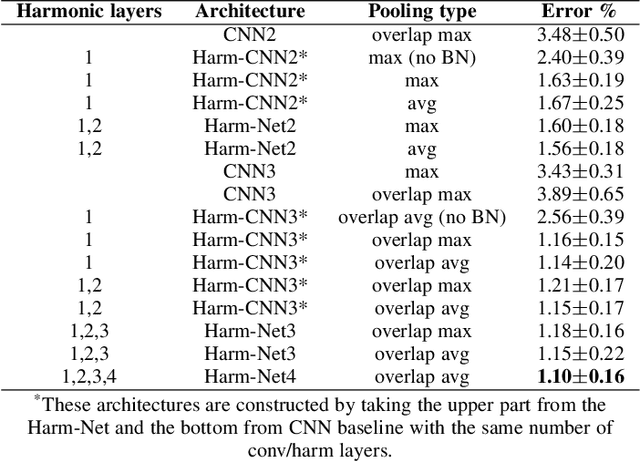
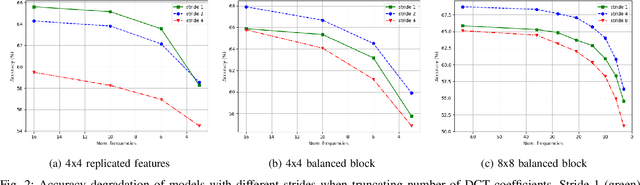
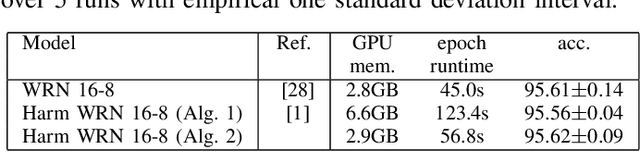
Convolutional neural networks (CNNs) learn filters in order to capture local correlation patterns in feature space. In this paper we propose to revert to learning combinations of preset spectral filters by switching to CNNs with harmonic blocks. We rely on the use of the Discrete Cosine Transform (DCT) filters which have excellent energy compaction properties and are widely used for image compression. The proposed harmonic blocks rely on DCT-modeling and replace conventional convolutional layers to produce partially or fully harmonic versions of new or existing CNN architectures. We demonstrate how the harmonic networks can be efficiently compressed in a straightforward manner by truncating high-frequency information in harmonic blocks which is possible due to the redundancies in the spectral domain. We report extensive experimental validation demonstrating the benefits of the introduction of harmonic blocks into state-of-the-art CNN models in image classification, segmentation and edge detection applications.
Harmonic Networks with Limited Training Samples
Apr 30, 2019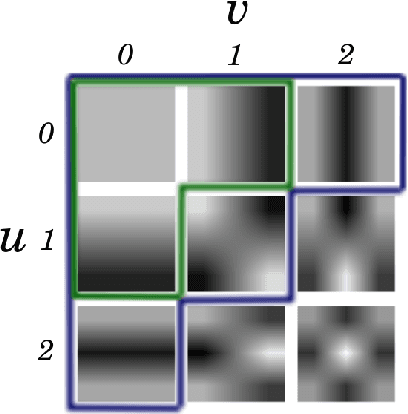
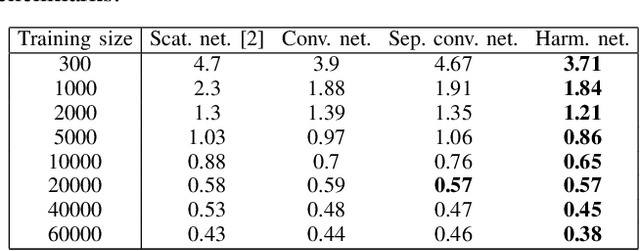
Convolutional neural networks (CNNs) are very popular nowadays for image processing. CNNs allow one to learn optimal filters in a (mostly) supervised machine learning context. However this typically requires abundant labelled training data to estimate the filter parameters. Alternative strategies have been deployed for reducing the number of parameters and / or filters to be learned and thus decrease overfitting. In the context of reverting to preset filters, we propose here a computationally efficient harmonic block that uses Discrete Cosine Transform (DCT) filters in CNNs. In this work we examine the performance of harmonic networks in limited training data scenario. We validate experimentally that its performance compares well against scattering networks that use wavelets as preset filters.
Harmonic Networks: Integrating Spectral Information into CNNs
Dec 07, 2018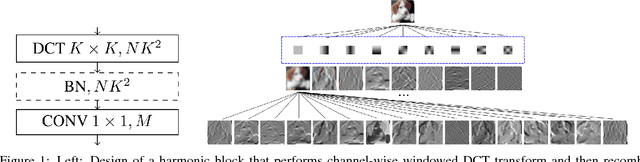
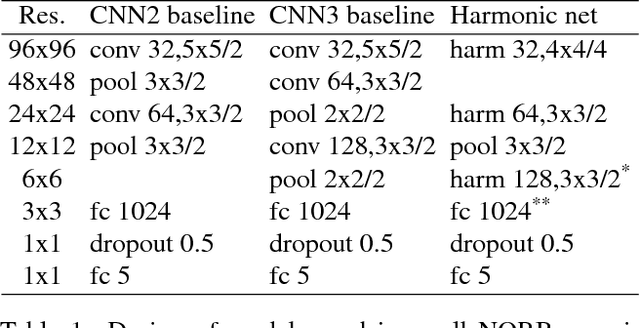
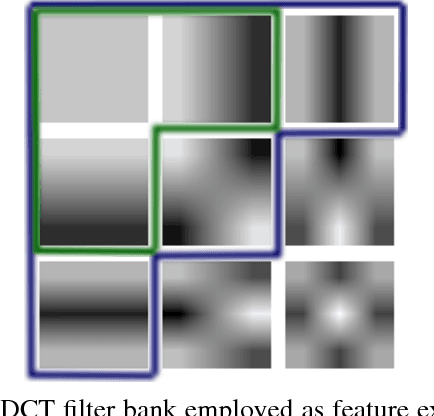
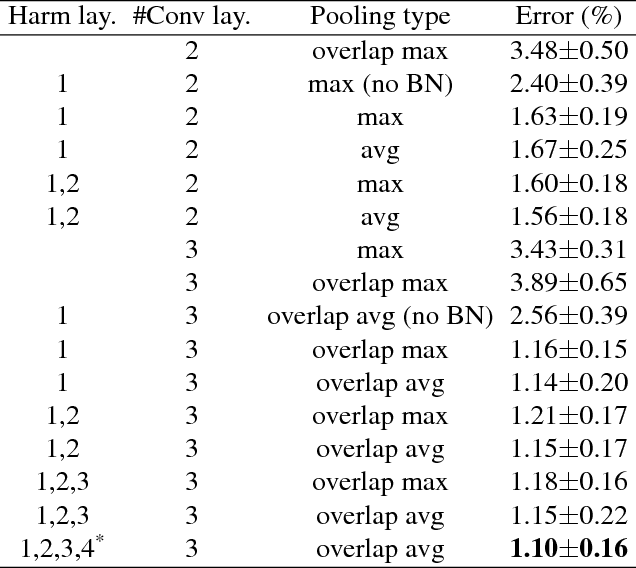
Convolutional neural networks (CNNs) learn filters in order to capture local correlation patterns in feature space. In contrast, in this paper we propose harmonic blocks that produce features by learning optimal combinations of spectral filters defined by the Discrete Cosine Transform. The harmonic blocks are used to replace conventional convolutional layers to construct partial or fully harmonic CNNs. We extensively validate our approach and show that the introduction of harmonic blocks into state-of-the-art CNN baseline architectures results in comparable or better performance in classification tasks on small NORB, CIFAR10 and CIFAR100 datasets.
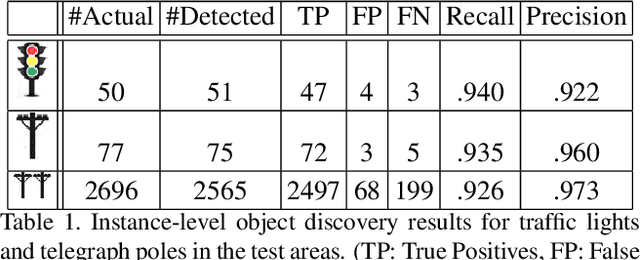
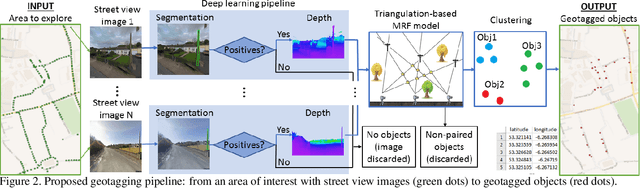
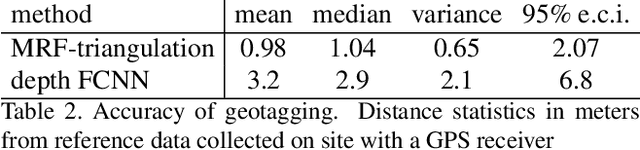
Automatic Discovery and Geotagging of Objects from Street View Imagery
Dec 01, 2017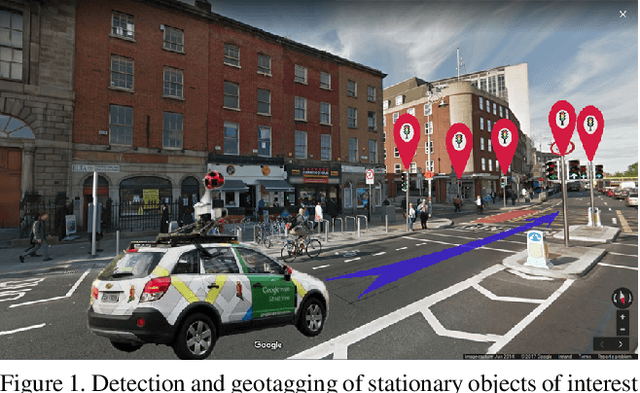
Many applications such as autonomous navigation, urban planning and asset monitoring, rely on the availability of accurate information about objects and their geolocations. In this paper we propose to automatically detect and compute the GPS coordinates of recurring stationary objects of interest using street view imagery. Our processing pipeline relies on two fully convolutional neural networks: the first segments objects in the images while the second estimates their distance from the camera. To geolocate all the detected objects coherently we propose a novel custom Markov Random Field model to perform objects triangulation. The novelty of the resulting pipeline is the combined use of monocular depth estimation and triangulation to enable automatic mapping of complex scenes with multiple visually similar objects of interest. We validate experimentally the effectiveness of our approach on two object classes: traffic lights and telegraph poles. The experiments report high object recall rates and GPS accuracy within 2 meters, which is comparable with the precision of single-frequency GPS receivers.