Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-wise Segmentation of Street with Neural Networks
Nov 02, 2015


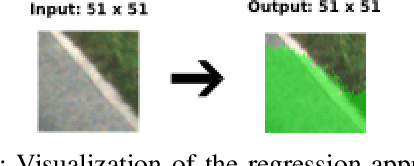
Pixel-wise street segmentation of photographs taken from a drivers perspective is important for self-driving cars and can also support other object recognition tasks. A framework called SST was developed to examine the accuracy and execution time of different neural networks. The best neural network achieved an $F_1$-score of 89.5% with a simple feedforward neural network which trained to solve a regression task.
Via