 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpisodic Memory Model for Learning Robotic Manipulation Tasks
Apr 20, 2021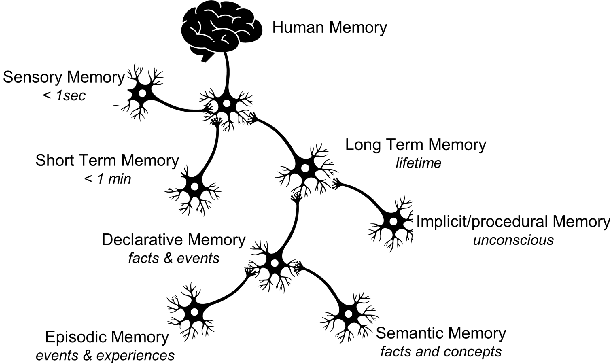
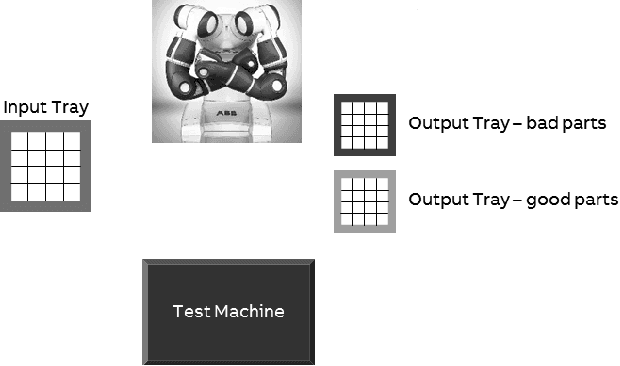
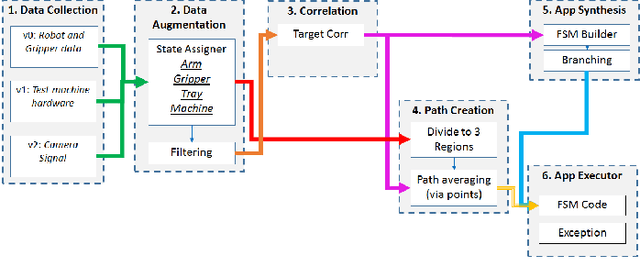
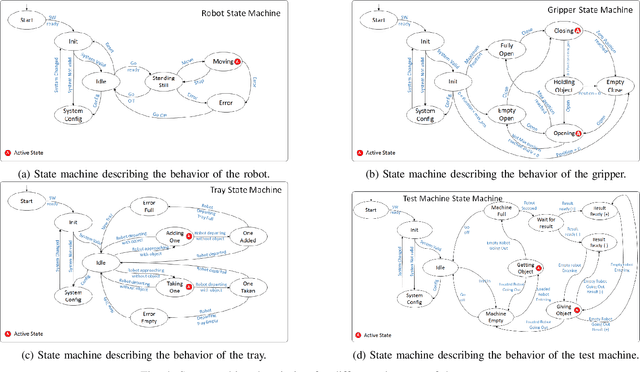
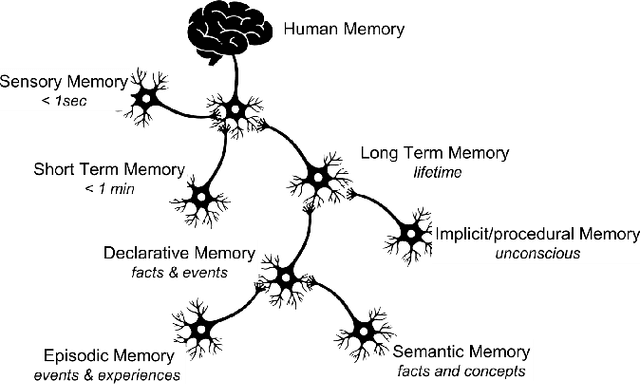
Machine learning, artificial intelligence and especially deep learning based approaches are often used to simplify or eliminate the burden of programming industrial robots. Using these approaches robots inherently learn a skill instead of being programmed using strict and tedious programming instructions. While deep learning is effective in making robots learn skills, it does not offer a practical route for teaching a complete task, such as assembly or machine tending, where a complex logic must be understood and related sub-tasks need to be performed. We present a model similar to an episodic memory that allows robots to comprehend sequences of actions using single demonstration and perform them properly and accurately. The algorithm identifies and recognizes the changes in the states of the system and memorizes how to execute the necessary tasks in order to make those changes. This allows the robot to decompose the tasks into smaller sub-tasks, retain the essential steps, and remember how they have been performed.
Dynamic Knowledge Graphs as Semantic Memory Model for Industrial Robots
Jan 06, 2021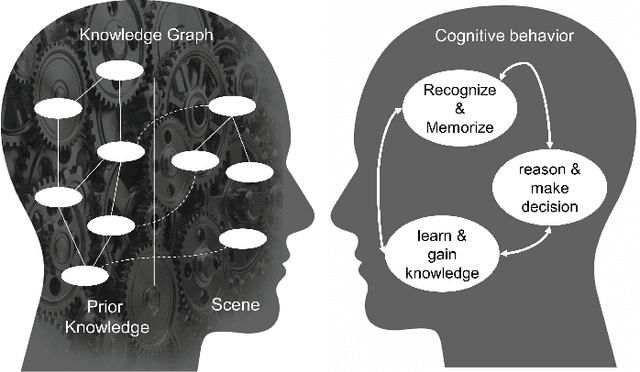
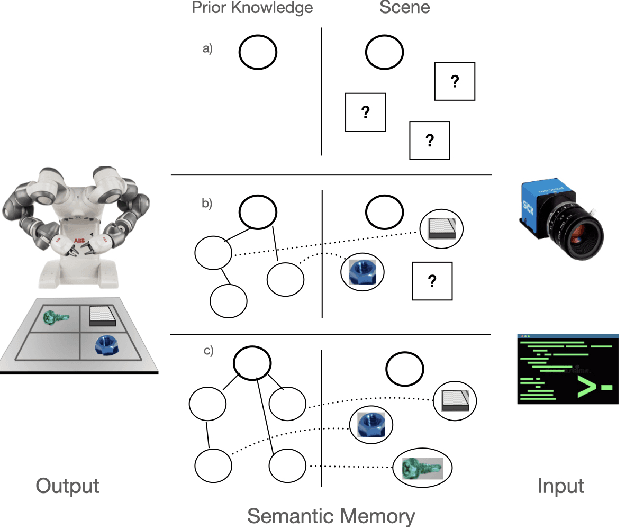
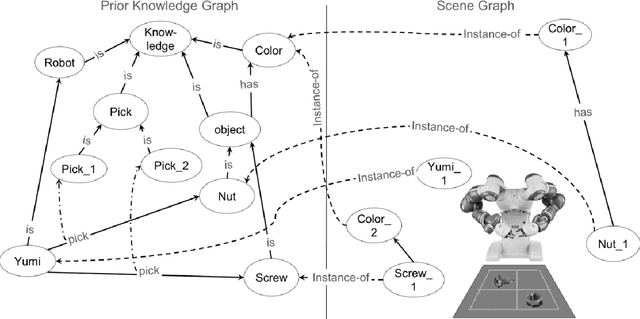
In this paper, we present a model for semantic memory that allows machines to collect information and experiences to become more proficient with time. After a semantic analysis of the data, information is stored in a knowledge graph which is used to comprehend instructions, expressed in natural language, and execute the required tasks in a deterministic manner. This imparts industrial robots cognitive behavior and an intuitive user interface, which is most appreciated in an era, when collaborative robots are to work alongside humans. The paper outlines the architecture of the system together with a practical implementation of the proposal.