Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Knowledge Graphs as Semantic Memory Model for Industrial Robots
Paper and Code
Jan 06, 2021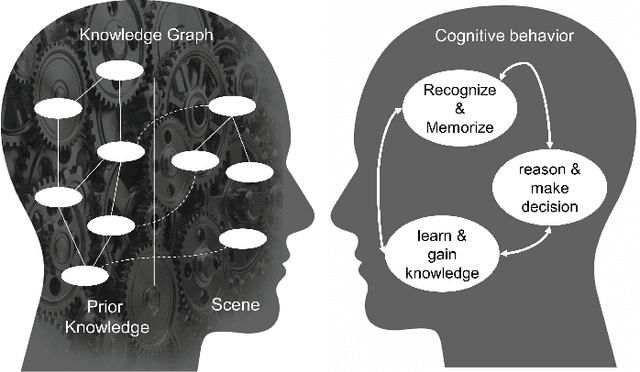
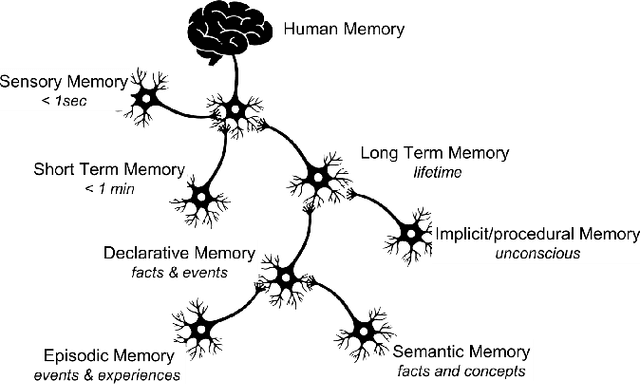
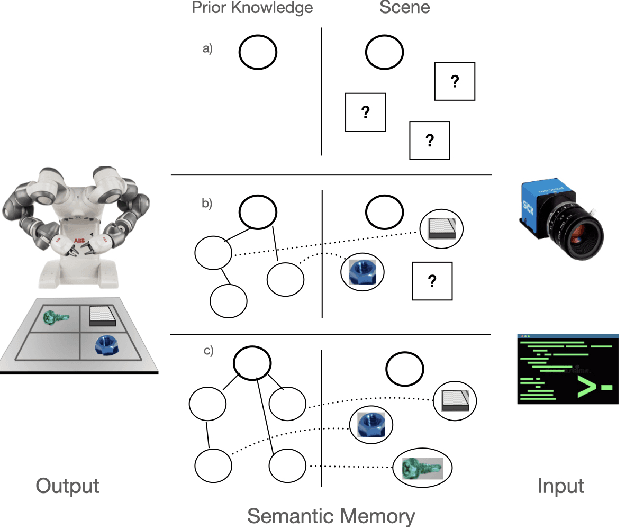
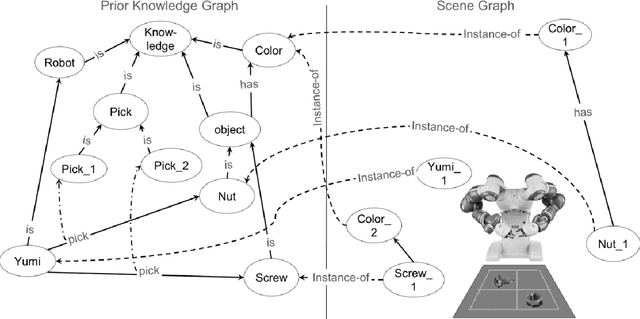
In this paper, we present a model for semantic memory that allows machines to collect information and experiences to become more proficient with time. After a semantic analysis of the data, information is stored in a knowledge graph which is used to comprehend instructions, expressed in natural language, and execute the required tasks in a deterministic manner. This imparts industrial robots cognitive behavior and an intuitive user interface, which is most appreciated in an era, when collaborative robots are to work alongside humans. The paper outlines the architecture of the system together with a practical implementation of the proposal.
* 9 pages, 11 figures
View paper on