 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAaP-ReID: Improved Attention-Aware Person Re-identification
Sep 27, 2023

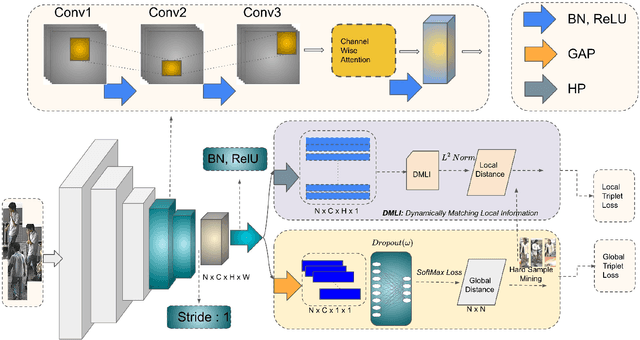
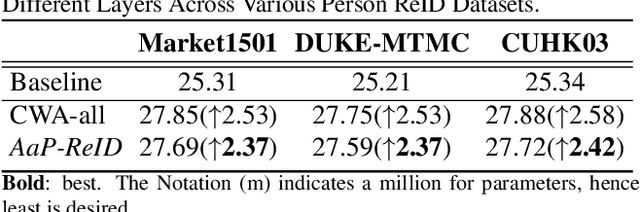
Person re-identification (ReID) is a well-known problem in the field of computer vision. The primary objective is to identify a specific individual within a gallery of images. However, this task is challenging due to various factors, such as pose variations, illumination changes, obstructions, and the presence ofconfusing backgrounds. Existing ReID methods often fail to capture discriminative features (e.g., head, shoes, backpacks) and instead capture irrelevant features when the target is occluded. Motivated by the success of part-based and attention-based ReID methods, we improve AlignedReID++ and present AaP-ReID, a more effective method for person ReID that incorporates channel-wise attention into a ResNet-based architecture. Our method incorporates the Channel-Wise Attention Bottleneck (CWAbottleneck) block and can learn discriminating features by dynamically adjusting the importance ofeach channel in the feature maps. We evaluated Aap-ReID on three benchmark datasets: Market-1501, DukeMTMC-reID, and CUHK03. When compared with state-of-the-art person ReID methods, we achieve competitive results with rank-1 accuracies of 95.6% on Market-1501, 90.6% on DukeMTMC-reID, and 82.4% on CUHK03.
Joint-YODNet: A Light-weight Object Detector for UAVs to Achieve Above 100fps
Sep 27, 2023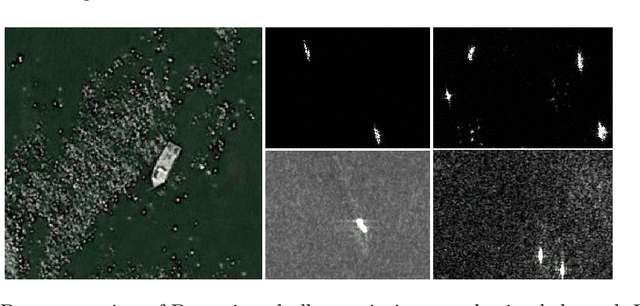
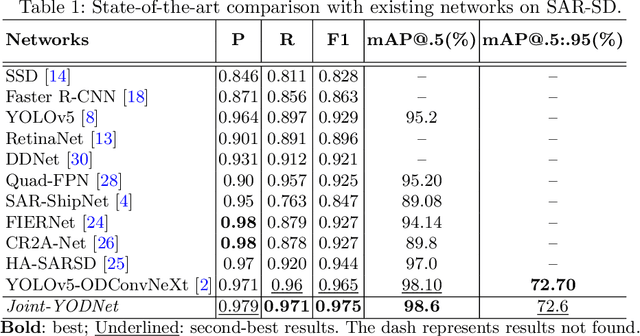
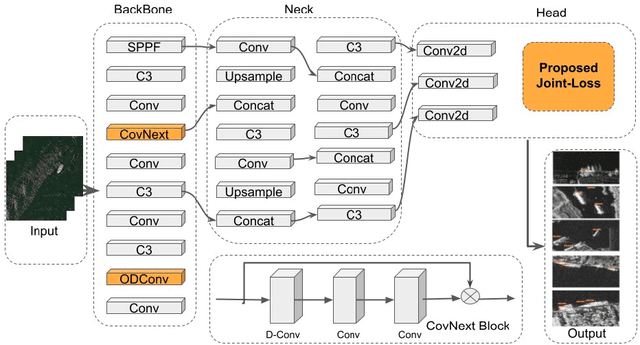

Small object detection via UAV (Unmanned Aerial Vehicle) images captured from drones and radar is a complex task with several formidable challenges. This domain encompasses numerous complexities that impede the accurate detection and localization of small objects. To address these challenges, we propose a novel method called JointYODNet for UAVs to detect small objects, leveraging a joint loss function specifically designed for this task. Our method revolves around the development of a joint loss function tailored to enhance the detection performance of small objects. Through extensive experimentation on a diverse dataset of UAV images captured under varying environmental conditions, we evaluated different variations of the loss function and determined the most effective formulation. The results demonstrate that our proposed joint loss function outperforms existing methods in accurately localizing small objects. Specifically, our method achieves a recall of 0.971, and a F1Score of 0.975, surpassing state-of-the-art techniques. Additionally, our method achieves a mAP@.5(%) of 98.6, indicating its robustness in detecting small objects across varying scales
YOLORe-IDNet: An Efficient Multi-Camera System for Person-Tracking
Sep 23, 2023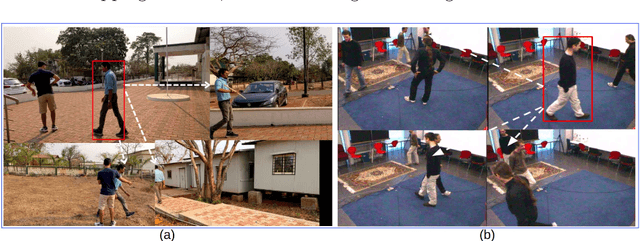

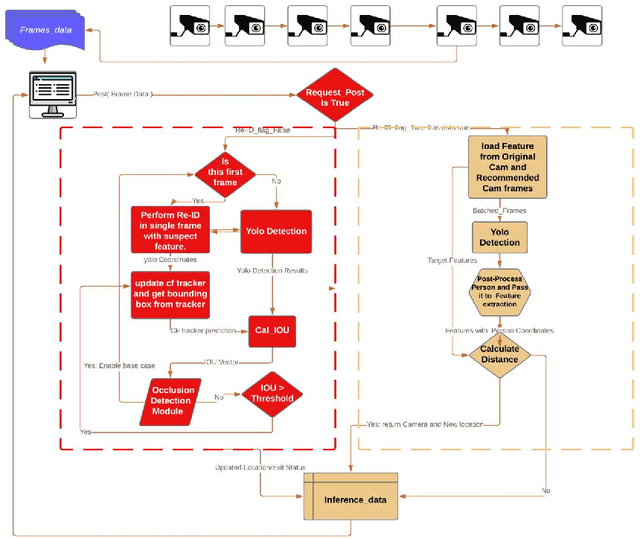
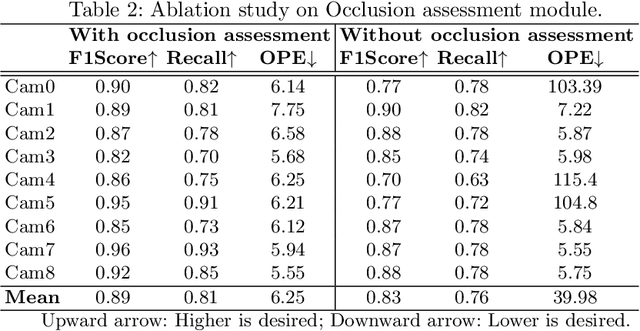
The growing need for video surveillance in public spaces has created a demand for systems that can track individuals across multiple cameras feeds in real-time. While existing tracking systems have achieved impressive performance using deep learning models, they often rely on pre-existing images of suspects or historical data. However, this is not always feasible in cases where suspicious individuals are identified in real-time and without prior knowledge. We propose a person-tracking system that combines correlation filters and Intersection Over Union (IOU) constraints for robust tracking, along with a deep learning model for cross-camera person re-identification (Re-ID) on top of YOLOv5. The proposed system quickly identifies and tracks suspect in real-time across multiple cameras and recovers well after full or partial occlusion, making it suitable for security and surveillance applications. It is computationally efficient and achieves a high F1-Score of 79% and an IOU of 59% comparable to existing state-of-the-art algorithms, as demonstrated in our evaluation on a publicly available OTB-100 dataset. The proposed system offers a robust and efficient solution for the real-time tracking of individuals across multiple camera feeds. Its ability to track targets without prior knowledge or historical data is a significant improvement over existing systems, making it well-suited for public safety and surveillance applications.