 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Hidden Physics and System Parameters with Deep Operator Networks
Dec 06, 2024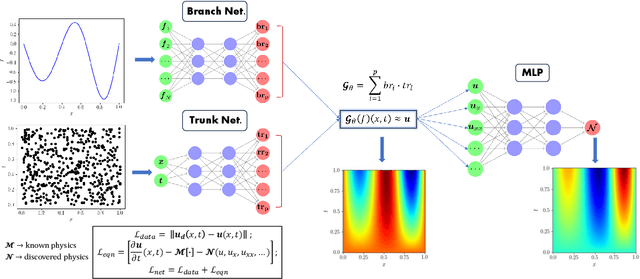
Big data is transforming scientific progress by enabling the discovery of novel models, enhancing existing frameworks, and facilitating precise uncertainty quantification, while advancements in scientific machine learning complement this by providing powerful tools to solve inverse problems to identify the complex systems where traditional methods falter due to sparse or noisy data. We introduce two innovative neural operator frameworks tailored for discovering hidden physics and identifying unknown system parameters from sparse measurements. The first framework integrates a popular neural operator, DeepONet, and a physics-informed neural network to capture the relationship between sparse data and the underlying physics, enabling the accurate discovery of a family of governing equations. The second framework focuses on system parameter identification, leveraging a DeepONet pre-trained on sparse sensor measurements to initialize a physics-constrained inverse model. Both frameworks excel in handling limited data and preserving physical consistency. Benchmarking on the Burgers' equation and reaction-diffusion system demonstrates state-of-the-art performance, achieving average $L_2$ errors of $\mathcal{O}(10^{-2})$ for hidden physics discovery and absolute errors of $\mathcal{O}(10^{-3})$ for parameter identification. These results underscore the frameworks' robustness, efficiency, and potential for solving complex scientific problems with minimal observational data.
Recovering the state and dynamics of autonomous system with partial states solution using neural networks
Aug 07, 2024In this paper we explore the performance of deep hidden physics model (M. Raissi 2018) for autonomous systems. These systems are described by set of ordinary differential equations which do not explicitly depend on time. Such systems can be found in nature and have applications in modeling chemical concentrations, population dynamics, n-body problems in physics etc. In this work we consider dynamics of states, which explain how the states will evolve are unknown to us. We approximate state and dynamics both using neural networks. We have considered examples of 2D linear/nonlinear and Lorenz systems. We observe that even without knowing all the states information, we can estimate dynamics of certain states whose state information are known.
A novel framework for generalization of deep hidden physics models
Jan 09, 2024Modelling of systems where the full system information is unknown is an oft encountered problem for various engineering and industrial applications, as it's either impossible to consider all the complex physics involved or simpler models are considered to keep within the limits of the available resources. Recent advances in greybox modelling like the deep hidden physics models address this space by combining data and physics. However, for most real-life applications, model generalizability is a key issue, as retraining a model for every small change in system inputs and parameters or modification in domain configuration can render the model economically unviable. In this work we present a novel enhancement to the idea of hidden physics models which can generalize for changes in system inputs, parameters and domains. We also show that this approach holds promise in system discovery as well and helps learn the hidden physics for the changed system inputs, parameters and domain configuration.
Physics-informed neural network for modeling dynamic linear elasticity
Jan 04, 2024In this work, we present the physics-informed neural network (PINN) model applied particularly to dynamic problems in solid mechanics. We focus on forward and inverse problems. Particularly, we show how a PINN model can be used efficiently for material identification in a dynamic setting. In this work, we assume linear continuum elasticity. We show results for two-dimensional (2D) plane strain problem and then we proceed to apply the same techniques for a three-dimensional (3D) problem. As for the training data we use the solution based on the finite element method. We rigorously show that PINN models are accurate, robust and computationally efficient, especially as a surrogate model for material identification problems. Also, we employ state-of-the-art techniques from the PINN literature which are an improvement to the vanilla implementation of PINN. Based on our results, we believe that the framework we have developed can be readily adapted to computational platforms for solving multiple dynamic problems in solid mechanics.