 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Gait State Prediction Using Cellular Automata and Classification Using ELM
May 08, 2021In this research article, we have reported periodic cellular automata rules for different gait state prediction and classification of the gait data using extreme machine Leaning (ELM). This research is the first attempt to use cellular automaton to understand the complexity of bipedal walk. Due to nonlinearity, varying configurations throughout the gait cycle and the passive joint located at the unilateral foot-ground contact in bipedal walk resulting variation of dynamic descriptions and control laws from phase to phase for human gait is making difficult to predict the bipedal walk states. We have designed the cellular automata rules which will predict the next gait state of bipedal steps based on the previous two neighbour states. We have designed cellular automata rules for normal walk. The state prediction will help to correctly design the bipedal walk. The normal walk depends on next two states and has total 8 states. We have considered the current and previous states to predict next state. So we have formulated 16 rules using cellular automata, 8 rules for each leg. The priority order maintained using the fact that if right leg in swing phase then left leg will be in stance phase. To validate the model we have classified the gait Data using ELM [1] and achieved accuracy 60%. We have explored the trajectories and compares with another gait trajectories. Finally we have presented the error analysis for different joints.
Data Driven Computational Model for Bipedal Walking and Push Recovery
Oct 18, 2017



In this research, we have developed the data driven computational walking model to overcome the problem with traditional kinematics based model. Our model is adaptable and can adjust the parameter morphological similar to human. The human walk is a combination of different discrete sub-phases with their continuous dynamics. Any system which exhibits the discrete switching logic and continuous dynamics can be represented using a hybrid system. In this research, the bipedal locomotion is analyzed which is important for understanding the stability and to negotiate with the external perturbations. We have also studied the other important behavior push recovery. The Push recovery is also a very important behavior acquired by human with continuous interaction with environment. The researchers are trying to develop robots that must have the capability of push recovery to safely maneuver in a dynamic environment. The push is a very commonly experienced phenomenon in cluttered environment. The human beings can recover from external push up to a certain extent using different strategies of hip, knee and ankle. The different human beings have different push recovery capabilities. For example a wrestler has a better push negotiation capability compared to normal human beings. The push negotiation capability acquired by human, therefore, is based on learning but the learning mechanism is still unknown to researchers. The research community across the world is trying to develop various humanoid models to solve this mystery. Seeing all the conventional mechanics and control based models have some inherent limitations, a learning based computational model has been developed to address effectively this issue. In this research we will discuss how we have framed this problem as hybrid system.
Analysis of Gait Pattern to Recognize the Human Activities
Aug 14, 2014



Human activity recognition based on the computer vision is the process of labelling image sequences with action labels. Accurate systems for this problem are applied in areas such as visual surveillance, human computer interaction and video retrieval.
Machine learning approach for text and document mining
Jun 06, 2014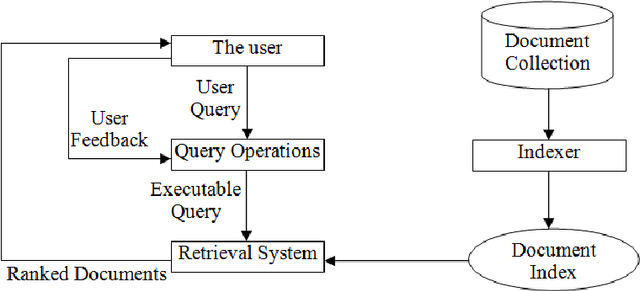
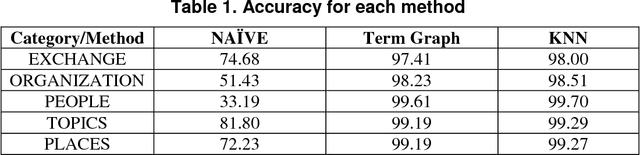
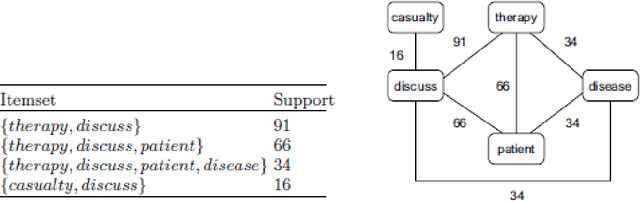
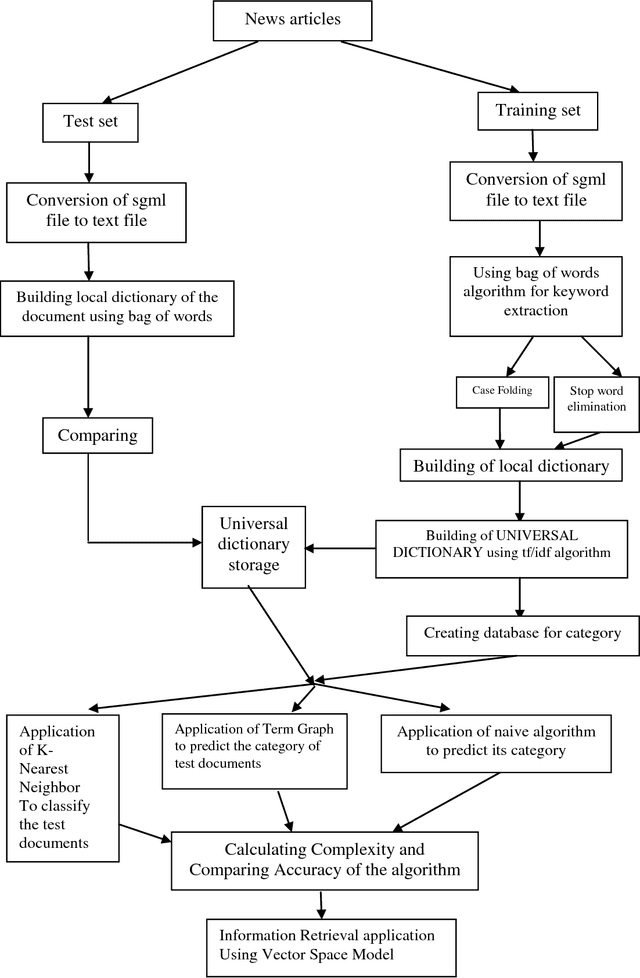
Text Categorization (TC), also known as Text Classification, is the task of automatically classifying a set of text documents into different categories from a predefined set. If a document belongs to exactly one of the categories, it is a single-label classification task; otherwise, it is a multi-label classification task. TC uses several tools from Information Retrieval (IR) and Machine Learning (ML) and has received much attention in the last years from both researchers in the academia and industry developers. In this paper, we first categorize the documents using KNN based machine learning approach and then return the most relevant documents.
Study of Humanoid Push Recovery Based on Experiments
May 18, 2014Human can negotiate and recovers from Push up to certain extent. The push recovery capability grows with age (a child has poor push recovery than an adult) and it is based on learning. A wrestler, for example, has better push recovery than an ordinary man. However, the mechanism of reactive push recovery is not known to us. We tried to understand the human learning mechanism by conducting several experiments. The subjects for the experiments were selected both as right handed and left handed. Pushes were induced from the behind with close eyes to observe the motor action as well as with open eyes to observe learning based reactive behaviors. Important observations show that the left handed and right handed persons negotiate pushes differently (in opposite manner). The present research describes some details about the experiments and the analyses of the results mainly obtained from the joint angle variations (both for ankle and hip joints) as the manifestation of perturbation. After smoothening the captured data through higher order polynomials, we feed them to our model which was developed exploiting the physics of an inverted pendulum and configured it as a representative of the subjects in the Webot simulation framework available in our laboratory. In each cases the model also could recover from the push for the same rage of perturbation which proves the correctness of the model. Hence the model now can provide greater insight to push recovery mechanism and can be used for determining push recovery strategy for humanoid robots. The paper claimed the push recovery is software engineering problem rather than hardware.
Bipedal Model Based on Human Gait Pattern Parameters for Sagittal Plane Movement
May 17, 2014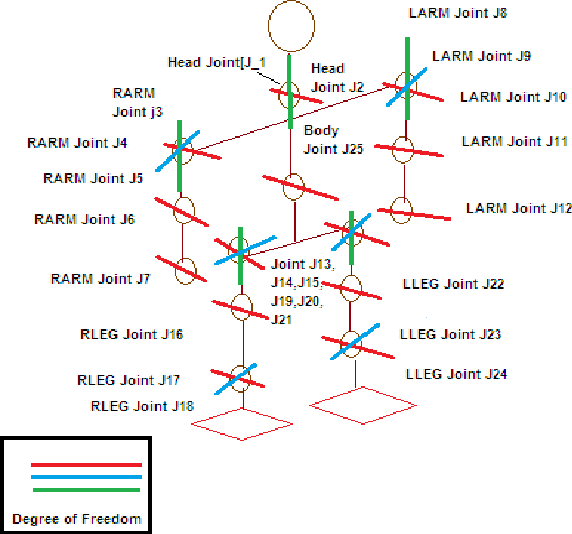



The present research as described in this paper tries to impart how imitation based learning for behavior-based programming can be used to teach the robot. This development is a big step in way to prove that push recovery is a software engineering problem and not hardware engineering problem. The walking algorithm used here aims to select a subset of push recovery problem i.e. disturbance from environment. We applied the physics at each joint of Halo with some degree of freedom. The proposed model, Halo is different from other models as previously developed model were inconsistent with data for different persons. This would lead to development of the generalized biped model in future and will bridge the gap between performance and inconsistency. In this paper the proposed model is applied to data of different persons. Accuracy of model, performance and result is measured using the behavior negotiation capability of model developed. In order to improve the performance, proposed model gives the freedom to handle each joint independently based on the belongingness value for each joint. The development can be considered as important development for future world of robotics. The accuracy of model is 70% in one go.
Real time face recognition using adaboost improved fast PCA algorithm
Aug 05, 2011


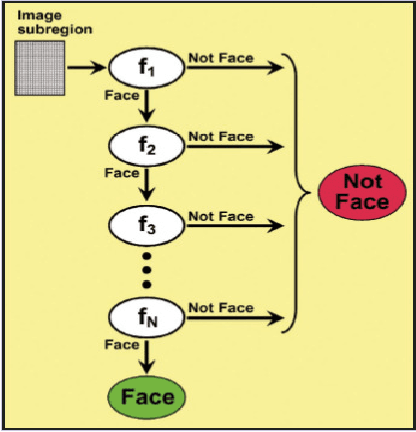
This paper presents an automated system for human face recognition in a real time background world for a large homemade dataset of persons face. The task is very difficult as the real time background subtraction in an image is still a challenge. Addition to this there is a huge variation in human face image in terms of size, pose and expression. The system proposed collapses most of this variance. To detect real time human face AdaBoost with Haar cascade is used and a simple fast PCA and LDA is used to recognize the faces detected. The matched face is then used to mark attendance in the laboratory, in our case. This biometric system is a real time attendance system based on the human face recognition with a simple and fast algorithms and gaining a high accuracy rate..
* 14 pages; ISSN : 0975-900X (Online), 0976-2191 (Print)