 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThat was not what I was aiming at! Differentiating human intent and outcome in a physically dynamic throwing task
Oct 26, 2024Recognising intent in collaborative human robot tasks can improve team performance and human perception of robots. Intent can differ from the observed outcome in the presence of mistakes which are likely in physically dynamic tasks. We created a dataset of 1227 throws of a ball at a target from 10 participants and observed that 47% of throws were mistakes with 16% completely missing the target. Our research leverages facial images capturing the person's reaction to the outcome of a throw to predict when the resulting throw is a mistake and then we determine the actual intent of the throw. The approach we propose for outcome prediction performs 38% better than the two-stream architecture used previously for this task on front-on videos. In addition, we propose a 1-D CNN model which is used in conjunction with priors learned from the frequency of mistakes to provide an end-to-end pipeline for outcome and intent recognition in this throwing task.
* Accepted October 2022 in Autonomous Robots. Published December 2022
Using Virtual Reality to Simulate Human-Robot Emergency Evacuation Scenarios
Oct 16, 2022

This paper describes our recent effort to use virtual reality to simulate threatening emergency evacuation scenarios in which a robot guides a person to an exit. Our prior work has demonstrated that people will follow a robot's guidance, even when the robot is faulty, during an emergency evacuation. Yet, because physical in-person emergency evacuation experiments are difficult and costly to conduct and because we would like to evaluate many different factors, we are motivated to develop a system that immerses people in the simulation environment to encourage genuine subject reactions. We are working to complete experiments verifying the validity of our approach.
Toward Ethical Robotic Behavior in Human-Robot Interaction Scenarios
Jun 21, 2022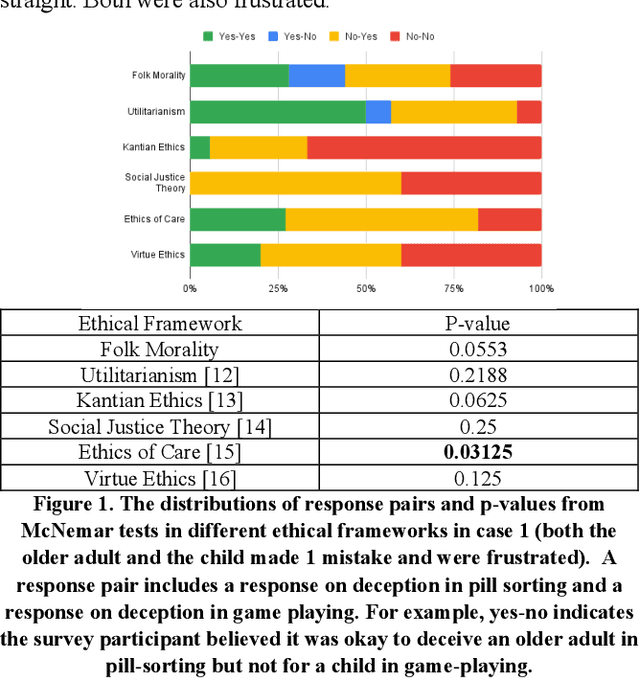

This paper describes current progress on developing an ethical architecture for robots that are designed to follow human ethical decision-making processes. We surveyed both regular adults (folks) and ethics experts (experts) on what they consider to be ethical behavior in two specific scenarios: pill-sorting with an older adult and game playing with a child. A key goal of the surveys is to better understand human ethical decision-making. In the first survey, folk responses were based on the subject's ethical choices ("folk morality"); in the second survey, expert responses were based on the expert's application of different formal ethical frameworks to each scenario. We observed that most of the formal ethical frameworks we included in the survey (Utilitarianism, Kantian Ethics, Ethics of Care and Virtue Ethics) and "folk morality" were conservative toward deception in the high-risk task with an older adult when both the adult and the child had significant performance deficiencies.