 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion of neural networks, for LIDAR-based evidential road mapping
Feb 05, 2021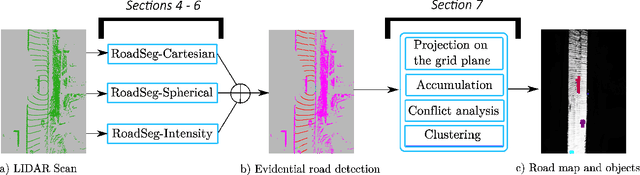
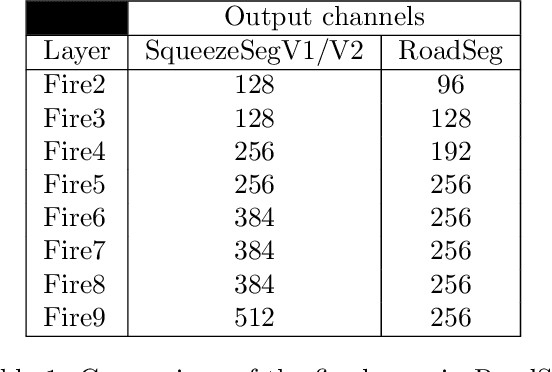
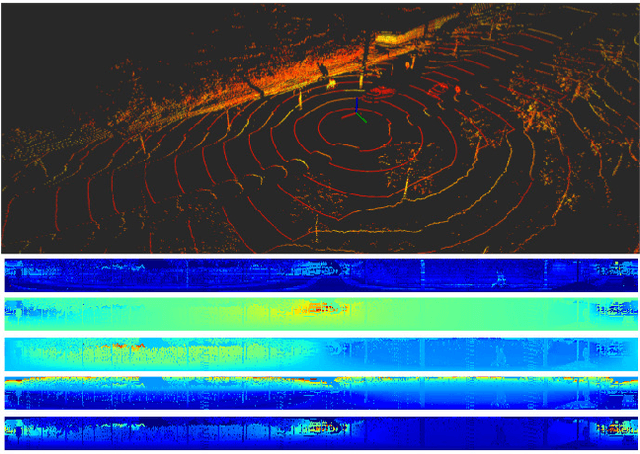

LIDAR sensors are usually used to provide autonomous vehicles with 3D representations of their environment. In ideal conditions, geometrical models could detect the road in LIDAR scans, at the cost of a manual tuning of numerical constraints, and a lack of flexibility. We instead propose an evidential pipeline, to accumulate road detection results obtained from neural networks. First, we introduce RoadSeg, a new convolutional architecture that is optimized for road detection in LIDAR scans. RoadSeg is used to classify individual LIDAR points as either belonging to the road, or not. Yet, such point-level classification results need to be converted into a dense representation, that can be used by an autonomous vehicle. We thus secondly present an evidential road mapping algorithm, that fuses consecutive road detection results. We benefitted from a reinterpretation of logistic classifiers, which can be seen as generating a collection of simple evidential mass functions. An evidential grid map that depicts the road can then be obtained, by projecting the classification results from RoadSeg into grid cells, and by handling moving objects via conflict analysis. The system was trained and evaluated on real-life data. A python implementation maintains a 10 Hz framerate. Since road labels were needed for training, a soft labelling procedure, relying lane-level HD maps, was used to generate coarse training and validation sets. An additional test set was manually labelled for evaluation purposes. So as to reach satisfactory results, the system fuses road detection results obtained from three variants of RoadSeg, processing different LIDAR features.