 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Attention Driven Reinforcement Learning (DAD-RL) for Autonomous Vehicle Decision-Making in Dynamic Environment
Jul 12, 2024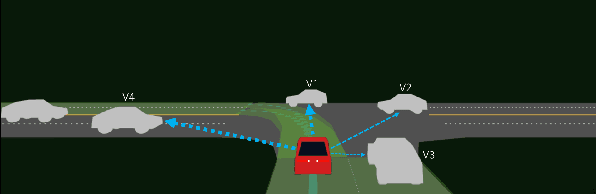

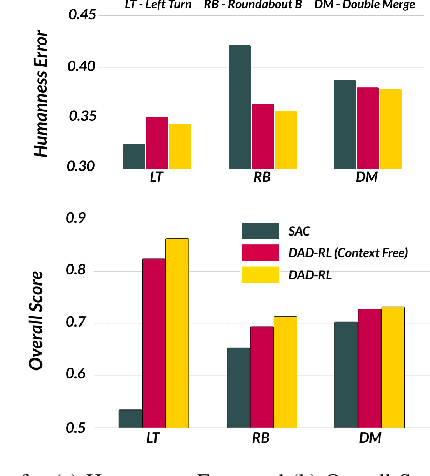

Autonomous Vehicle (AV) decision making in urban environments is inherently challenging due to the dynamic interactions with surrounding vehicles. For safe planning, AV must understand the weightage of various spatiotemporal interactions in a scene. Contemporary works use colossal transformer architectures to encode interactions mainly for trajectory prediction, resulting in increased computational complexity. To address this issue without compromising spatiotemporal understanding and performance, we propose the simple Deep Attention Driven Reinforcement Learning (DADRL) framework, which dynamically assigns and incorporates the significance of surrounding vehicles into the ego's RL driven decision making process. We introduce an AV centric spatiotemporal attention encoding (STAE) mechanism for learning the dynamic interactions with different surrounding vehicles. To understand map and route context, we employ a context encoder to extract features from context maps. The spatiotemporal representations combined with contextual encoding provide a comprehensive state representation. The resulting model is trained using the Soft Actor Critic (SAC) algorithm. We evaluate the proposed framework on the SMARTS urban benchmarking scenarios without traffic signals to demonstrate that DADRL outperforms recent state of the art methods. Furthermore, an ablation study underscores the importance of the context-encoder and spatio temporal attention encoder in achieving superior performance.
Graph-based Prediction and Planning Policy Network (GP3Net) for scalable self-driving in dynamic environments using Deep Reinforcement Learning
Dec 10, 2023



Recent advancements in motion planning for Autonomous Vehicles (AVs) show great promise in using expert driver behaviors in non-stationary driving environments. However, learning only through expert drivers needs more generalizability to recover from domain shifts and near-failure scenarios due to the dynamic behavior of traffic participants and weather conditions. A deep Graph-based Prediction and Planning Policy Network (GP3Net) framework is proposed for non-stationary environments that encodes the interactions between traffic participants with contextual information and provides a decision for safe maneuver for AV. A spatio-temporal graph models the interactions between traffic participants for predicting the future trajectories of those participants. The predicted trajectories are utilized to generate a future occupancy map around the AV with uncertainties embedded to anticipate the evolving non-stationary driving environments. Then the contextual information and future occupancy maps are input to the policy network of the GP3Net framework and trained using Proximal Policy Optimization (PPO) algorithm. The proposed GP3Net performance is evaluated on standard CARLA benchmarking scenarios with domain shifts of traffic patterns (urban, highway, and mixed). The results show that the GP3Net outperforms previous state-of-the-art imitation learning-based planning models for different towns. Further, in unseen new weather conditions, GP3Net completes the desired route with fewer traffic infractions. Finally, the results emphasize the advantage of including the prediction module to enhance safety measures in non-stationary environments.