 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrivers' Manoeuvre Modelling and Prediction for Safe HRI
Jun 03, 2021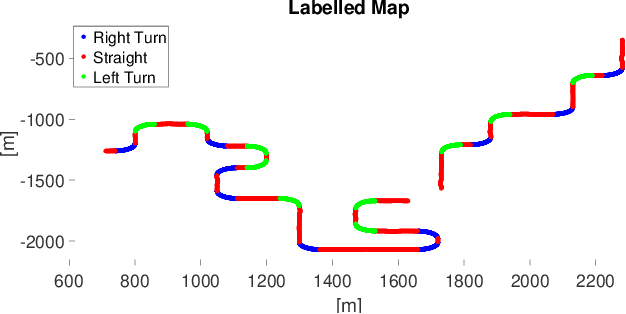
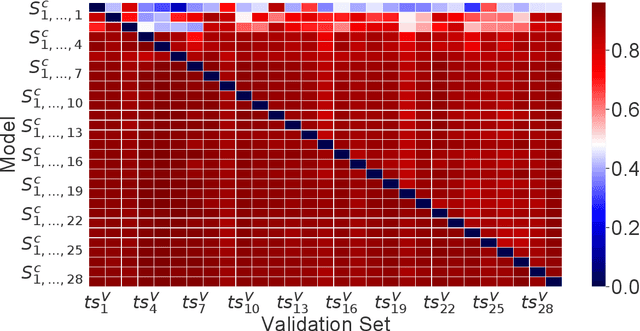
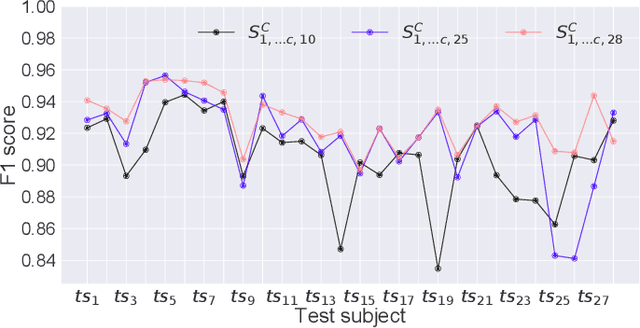
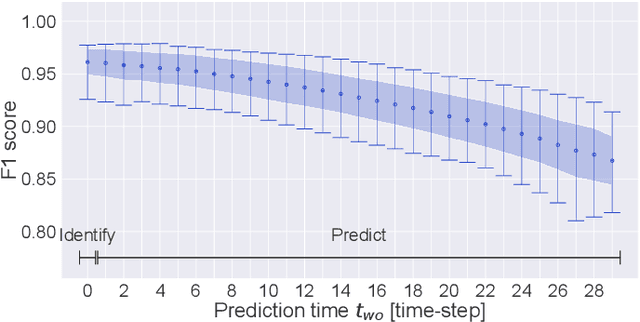
As autonomous machines such as robots and vehicles start performing tasks involving human users, ensuring a safe interaction between them becomes an important issue. Translating methods from human-robot interaction (HRI) studies to the interaction between humans and other highly complex machines (e.g. semi-autonomous vehicles) could help advance the use of those machines in scenarios requiring human interaction. One method involves understanding human intentions and decision-making to estimate the human's present and near-future actions whilst interacting with a robot. This idea originates from the psychological concept of Theory of Mind, which has been broadly explored for robotics and recently for autonomous and semi-autonomous vehicles. In this work, we explored how to predict human intentions before an action is performed by combining data from human-motion, vehicle-state and human inputs (e.g. steering wheel, pedals). A data-driven approach based on Recurrent Neural Network models was used to classify the current driving manoeuvre and to predict the future manoeuvre to be performed. A state-transition model was used with a fixed set of manoeuvres to label data recorded during the trials for real-time applications. Models were trained and tested using drivers of different seat preferences, driving expertise and arm-length; precision and recall metrics over 95% for manoeuvre identification and 86% for manoeuvre prediction were achieved, with prediction time-windows of up to 1 second for both known and unknown test subjects. Compared to our previous results, performance improved and manoeuvre prediction was possible for unknown test subjects without knowing the current manoeuvre.
Towards the Safety of Human-in-the-Loop Robotics: Challenges and Opportunities for Safety Assurance of Robotic Co-Workers
Jun 04, 2014The success of the human-robot co-worker team in a flexible manufacturing environment where robots learn from demonstration heavily relies on the correct and safe operation of the robot. How this can be achieved is a challenge that requires addressing both technical as well as human-centric research questions. In this paper we discuss the state of the art in safety assurance, existing as well as emerging standards in this area, and the need for new approaches to safety assurance in the context of learning machines. We then focus on robotic learning from demonstration, the challenges these techniques pose to safety assurance and indicate opportunities to integrate safety considerations into algorithms "by design". Finally, from a human-centric perspective, we stipulate that, to achieve high levels of safety and ultimately trust, the robotic co-worker must meet the innate expectations of the humans it works with. It is our aim to stimulate a discussion focused on the safety aspects of human-in-the-loop robotics, and to foster multidisciplinary collaboration to address the research challenges identified.