 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFloorSAM: SAM-Guided Floorplan Reconstruction with Semantic-Geometric Fusion
Sep 19, 2025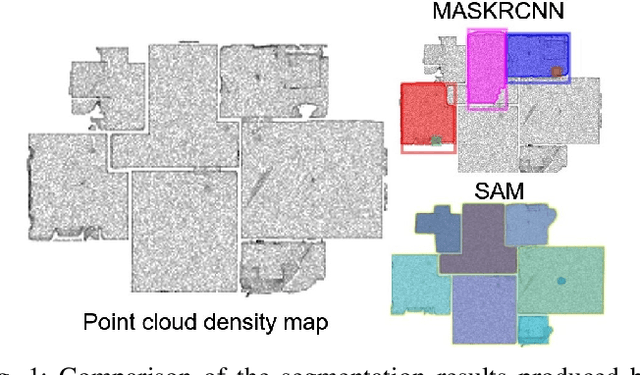
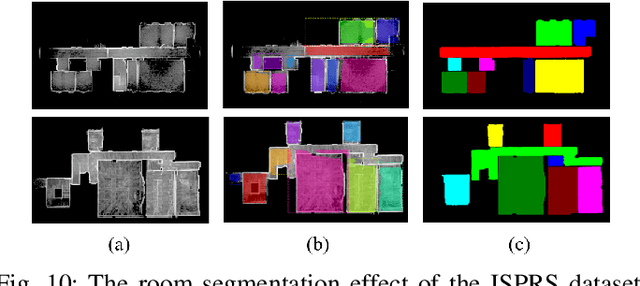
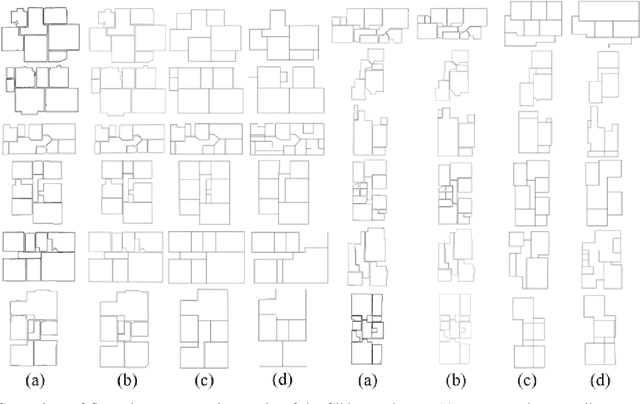
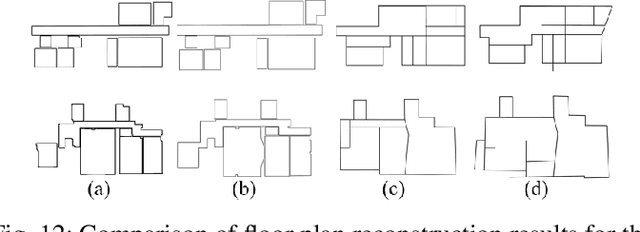
Reconstructing building floor plans from point cloud data is key for indoor navigation, BIM, and precise measurements. Traditional methods like geometric algorithms and Mask R-CNN-based deep learning often face issues with noise, limited generalization, and loss of geometric details. We propose FloorSAM, a framework that integrates point cloud density maps with the Segment Anything Model (SAM) for accurate floor plan reconstruction from LiDAR data. Using grid-based filtering, adaptive resolution projection, and image enhancement, we create robust top-down density maps. FloorSAM uses SAM's zero-shot learning for precise room segmentation, improving reconstruction across diverse layouts. Room masks are generated via adaptive prompt points and multistage filtering, followed by joint mask and point cloud analysis for contour extraction and regularization. This produces accurate floor plans and recovers room topological relationships. Tests on Giblayout and ISPRS datasets show better accuracy, recall, and robustness than traditional methods, especially in noisy and complex settings. Code and materials: github.com/Silentbarber/FloorSAM.
CDT-Dijkstra: Fast Planning of Globally Optimal Paths for All Points in 2D Continuous Space
Aug 06, 2023The Dijkstra algorithm is a classic path planning method, which in a discrete graph space, can start from a specified source node and find the shortest path between the source node and all other nodes in the graph. However, to the best of our knowledge, there is no effective method that achieves a function similar to that of the Dijkstra's algorithm in a continuous space. In this study, an optimal path planning algorithm called convex dissection topology (CDT)-Dijkstra is developed, which can quickly compute the global optimal path from one point to all other points in a 2D continuous space. CDT-Dijkstra is mainly divided into two stages: SetInit and GetGoal. In SetInit, the algorithm can quickly obtain the optimal CDT encoding set of all the cut lines based on the initial point x_{init}. In GetGoal, the algorithm can return the global optimal path of any goal point at an extremely high speed. In this study, we propose and prove the planning principle of considering only the points on the cutlines, thus reducing the state space of the distance optimal path planning task from 2D to 1D. In addition, we propose a fast method to find the optimal path in a homogeneous class and theoretically prove the correctness of the method. Finally, by testing in a series of environments, the experimental results demonstrate that CDT-Dijkstra not only plans the optimal path from all points at once, but also has a significant advantage over advanced algorithms considering certain complex tasks.
Homotopy Path Class Encoder Based on Convex Dissection Topology
Feb 25, 2023



The concept of path homotopy has received widely attention in the field of path planning in recent years. However, as far as we know, there is no method that fast and efficiently determines the congruence between paths and can be used directly to guide the path planning process. In this article, a topological encoder based on convex dissection for a two-dimensional bounded Euclidean space is developed, which can efficiently encode all homotopy path classes between any two points. Thereafter, the optimal path planning task is thus consisted of two steps: (i) search for the homotopy path class that may contain the optimal path, and (ii) obtain the shortest homotopy path in this class. Furthermore, an optimal path planning algorithm called RWCDT (Random Walk based on Convex Division Topology), is proposed. RWCDT uses a constrained random walk search algorithm to search for different homotopy path classes and applies an iterative compression algorithm to obtain the shortest path in each class. Through a series of experiments, it was determined that the performance of the proposed algorithm is comparable with state-of-the-art path planning algorithms. Hence, the application significance of the developed homotopy path class encoder in the field of path planning was verified.