 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunicative Robot Signals: Presenting a New Typology for Human-Robot Interaction
Feb 08, 2023

We present a new typology for classifying signals from robots when they communicate with humans. For inspiration, we use ethology, the study of animal behaviour and previous efforts from literature as guides in defining the typology. The typology is based on communicative signals that consist of five properties: the origin where the signal comes from, the deliberateness of the signal, the signal's reference, the genuineness of the signal, and its clarity (i.e., how implicit or explicit it is). Using the accompanying worksheet, the typology is straightforward to use to examine communicative signals from previous human-robot interactions and provides guidance for designers to use the typology when designing new robot behaviours.
Using Social Robots to Teach Language Skills to Immigrant Children in an Oslo City District
Oct 12, 2020
Social robots have been shown to help in language education for children. This can be good aid for immigrant children that need additional help to learn a second language their parents do not understand to attend school. We present the setup for a long-term study that is being carried out in blinded to aid immigrant children with poor skills in the Norwegian language to improve their vocabulary. This includes additional tools to help parents follow along and provide additional help at home.
Differences of Human Perceptions of a Robot Moving using Linear or Slow in, Slow out Velocity Profiles When Performing a Cleaning Task
Mar 25, 2020



We investigated how a robot moving with different velocity profiles affects a person's perception of it when working together on a task. The two profiles are the common linear profile and a profile based on the animation principles of slow in, slow out. The investigation was accomplished by running an experiment in a home context where people and the robot cooperated on a clean-up task. We used the Godspeed series of questionnaires to gather people's perception of the robot. Average scores for each series appear not to be different enough to reject the null hypotheses, but looking at the component items provides paths to future areas of research. We also discuss the scenario for the experiment and how it may be used for future research into using animation techniques for moving robots and improving the legibility of a robot's locomotion.
* 8 pages, 8 figures, 5 tables, 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Privacy at Home: an Inquiry into Sensors and Robots for the Stay at Home Elderly
Mar 25, 2020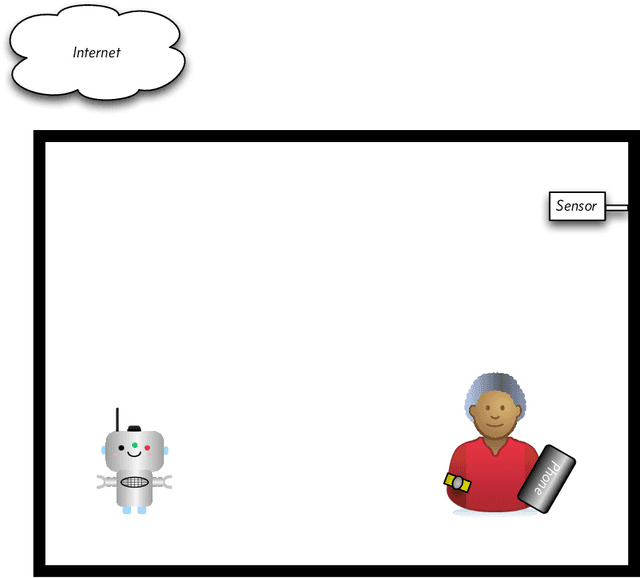



The elderly in the future will use smart house technology, sensors, and robots to stay at home longer. Privacy at home for these elderly is important. In this exploratory paper, we examine different understandings of privacy and use Palen and Dourish's framework to look at the negotiation of privacy along boundaries between a human at home, the robot, and its sensors. We select three dilemmas: turning sensors on and off, the robot seeing through walls, and machine learning. We discuss these dilemmas and also discuss ways the robot can help make the elderly more aware of privacy issues and to build trust.
* 18 pages, 5 figures, International Conference on Human Aspects of IT for the Aged Population, Part of 2018 HCI International
Animation Techniques in Human-Robot Interaction User Studies: a Systematic Literature Review
Apr 04, 2019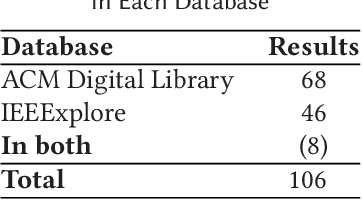
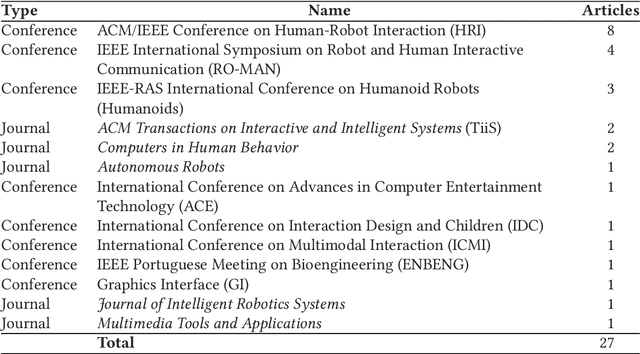


There are many different ways a robot can move in Human-Robot Interaction. One way is to use techniques from film animation to instruct the robot to move. This article is a systematic literature review of human-robot trials, pilots, and evaluations that have applied techniques from animation to move a robot. Through 27 articles, we find that animation techniques improves individual's interaction with robots, improving individual's perception of qualities of a robot, understanding what a robot intends to do, and showing the robot's state, or possible emotion. Animation techniques also help people relate to robots that do not resemble a human or robot. The studies in the articles show further areas for research, such as applying animation principles in other types of robots and situations, combining animation techniques with other modalities, and testing robots moving with animation techniques over the long term.