Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing Computing Platforms for Deep Learning on a Humanoid Robot
Jan 20, 2019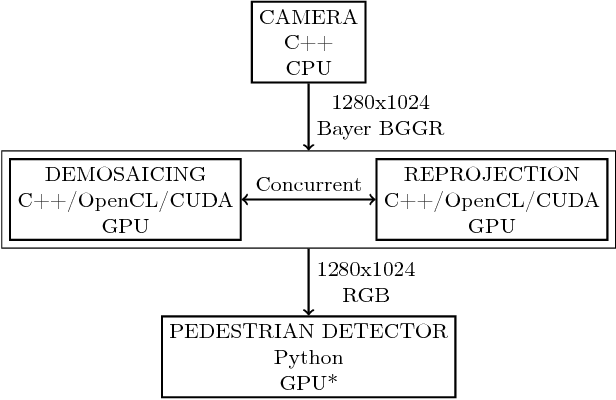
The goal of this study is to test two different computing platforms with respect to their suitability for running deep networks as part of a humanoid robot software system. One of the platforms is the CPU-centered Intel NUC7i7BNH and the other is a NVIDIA Jetson TX2 system that puts more emphasis on GPU processing. The experiments addressed a number of benchmarking tasks including pedestrian detection using deep neural networks. Some of the results were unexpected but demonstrate that platforms exhibit both advantages and disadvantages when taking computational performance and electrical power requirements of such a system into account.
* Neural Information Processing, 11307 (2018), 120-131
* 12 pages, 5 figures
* 12 pages, 5 figures
Via