 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Vision-Language Models Understand and Interpret Dynamic Gestures from Pedestrians? Pilot Datasets and Exploration Towards Instructive Nonverbal Commands for Cooperative Autonomous Vehicles
Apr 15, 2025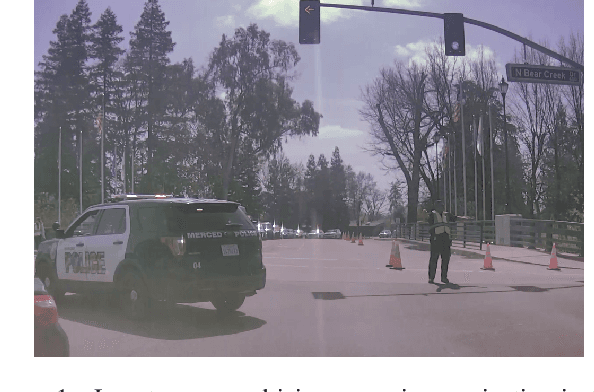



In autonomous driving, it is crucial to correctly interpret traffic gestures (TGs), such as those of an authority figure providing orders or instructions, or a pedestrian signaling the driver, to ensure a safe and pleasant traffic environment for all road users. This study investigates the capabilities of state-of-the-art vision-language models (VLMs) in zero-shot interpretation, focusing on their ability to caption and classify human gestures in traffic contexts. We create and publicly share two custom datasets with varying formal and informal TGs, such as 'Stop', 'Reverse', 'Hail', etc. The datasets are "Acted TG (ATG)" and "Instructive TG In-The-Wild (ITGI)". They are annotated with natural language, describing the pedestrian's body position and gesture. We evaluate models using three methods utilizing expert-generated captions as baseline and control: (1) caption similarity, (2) gesture classification, and (3) pose sequence reconstruction similarity. Results show that current VLMs struggle with gesture understanding: sentence similarity averages below 0.59, and classification F1 scores reach only 0.14-0.39, well below the expert baseline of 0.70. While pose reconstruction shows potential, it requires more data and refined metrics to be reliable. Our findings reveal that although some SOTA VLMs can interpret zero-shot human traffic gestures, none are accurate and robust enough to be trustworthy, emphasizing the need for further research in this domain.