 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Output Regulation with Mixed Time- and Event-triggered Observers
May 05, 2021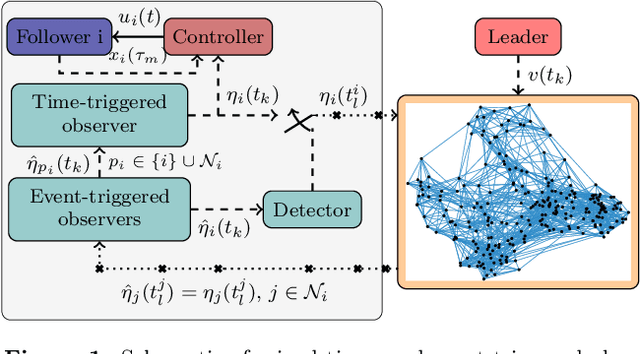
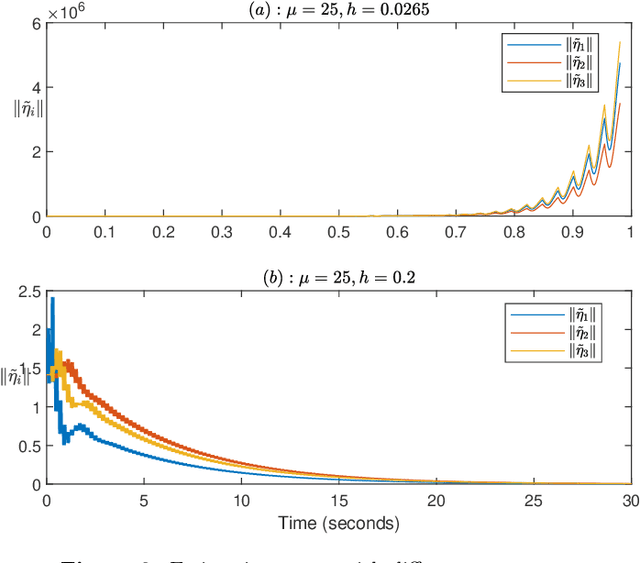

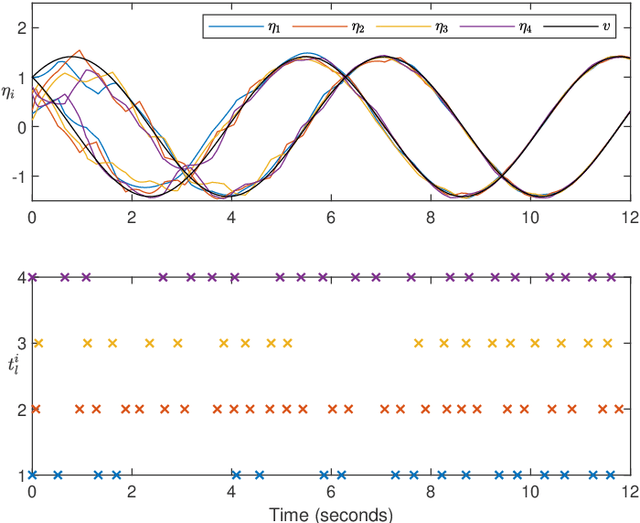
Mixed time- and event-triggered cooperative output regulation for heterogeneous distributed systems is investigated in this paper. A distributed observer with time-triggered observations is proposed to estimate the state of the leader, and an auxiliary observer with event-triggered communication is designed to reduce the information exchange among followers. A necessary and sufficient condition for the existence of desirable time-triggered observers is established, and delicate relationships among sampling periods, topologies, and reference signals are revealed. An event-triggering mechanism based on local sampled data is proposed to regulate the communication among agents; and the convergence of the estimation errors under the mechanism holds for a class of positive and convergent triggering functions, which include the commonly used exponential function as a special case. The mixed time- and event-triggered system naturally excludes the existence of Zeno behavior as the system updates at discrete instants. When the triggering function is bounded by exponential functions, analytical characterization of the relationship among sampling, event triggering, and inter-event behaviour is established. Finally, several examples are provided to illustrate the effectiveness and merits of the theoretical results.