 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Experience for Rapid Generation of Local Car Maneuvers
Dec 07, 2020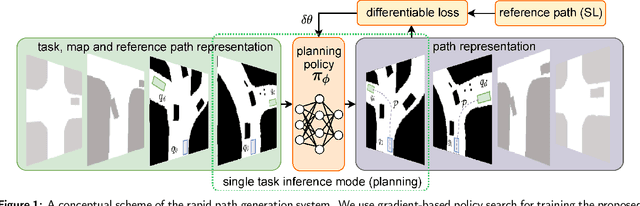
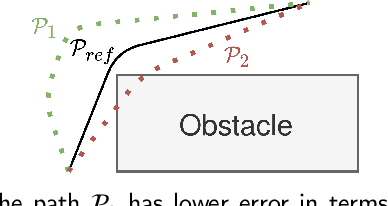
Being able to rapidly respond to the changing scenes and traffic situations by generating feasible local paths is of pivotal importance for car autonomy. We propose to train a deep neural network (DNN) to plan feasible and nearly-optimal paths for kinematically constrained vehicles in small constant time. Our DNN model is trained using a novel weakly supervised approach and a gradient-based policy search. On real and simulated scenes and a large set of local planning problems, we demonstrate that our approach outperforms the existing planners with respect to the number of successfully completed tasks. While the path generation time is about 40 ms, the generated paths are smooth and comparable to those obtained from conventional path planners.
A Self-Supervised Learning Approach to Rapid Path Planning for Car-Like Vehicles Maneuvering in Urban Environment
Mar 02, 2020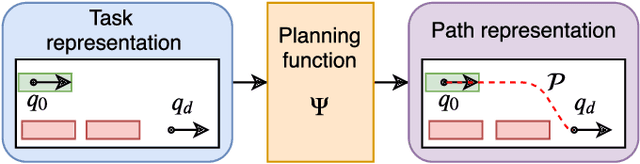
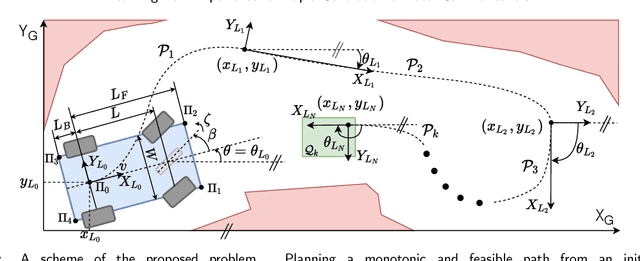
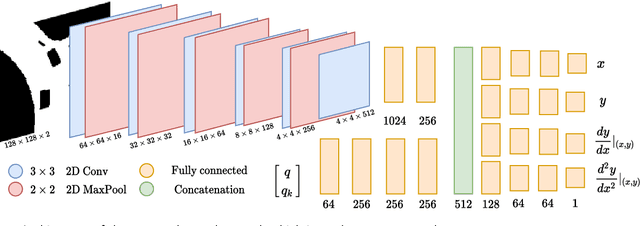
An efficient path planner for autonomous car-like vehicles should handle the strong kinematic constraints, particularly in confined spaces commonly encountered while maneuvering in city traffic, and should enable rapid planning, as the city traffic scenarios are highly dynamic. State-of-the-art planning algorithms handle such difficult cases at high computational cost, often yielding non-deterministic results. However, feasible local paths can be quickly generated leveraging the past planning experience gained in the same or similar environment. While learning through supervised training is problematic for real traffic scenarios, we introduce in this paper a novel neural network-based method for path planning, which employs a gradient-based self-supervised learning algorithm to predict feasible paths. This approach strongly exploits the experience gained in the past and rapidly yields feasible maneuver plans for car-like vehicles with limited steering-angle. The effectiveness of such an approach has been confirmed by computational experiments.