 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobally Optimal Inverse Kinematics as a Quadratic Program
Dec 25, 2023

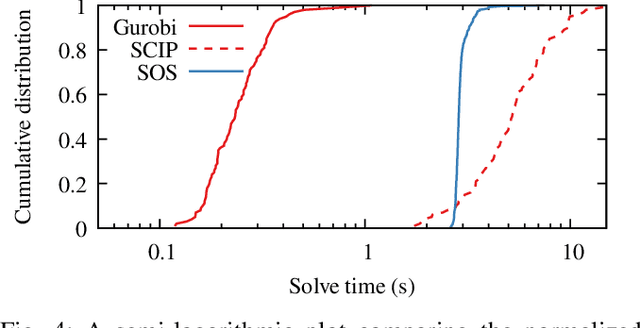
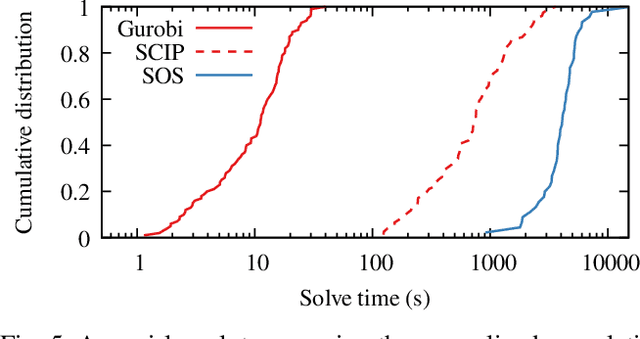
We show how to compute globally optimal solutions to inverse kinematics (IK) by formulating the problem as an indefinite quadratically constrained quadratic program. Our approach makes it feasible to solve IK instances of generic redundant manipulators. We demonstrate the performance on randomly generated designs and on real-world robots with up to ten revolute joints. The same technique can be used for manipulator design by introducing kinematic parameters as variables.
Catch Me If You Can: Improving Adversaries in Cyber-Security With Q-Learning Algorithms
Feb 07, 2023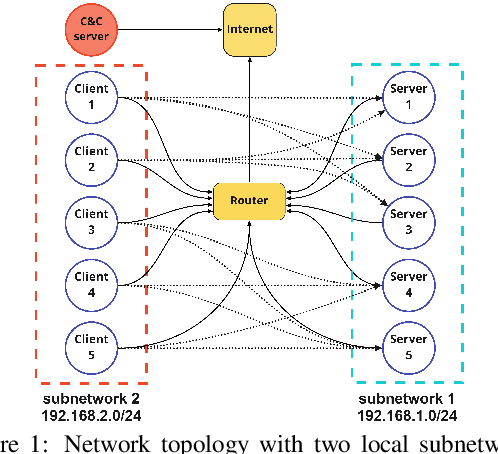
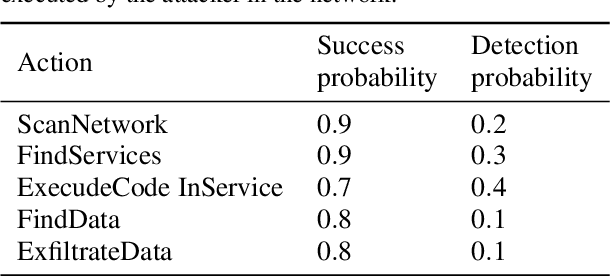
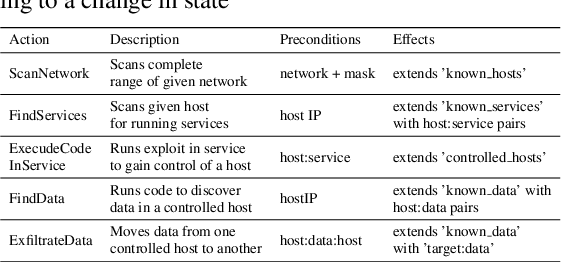
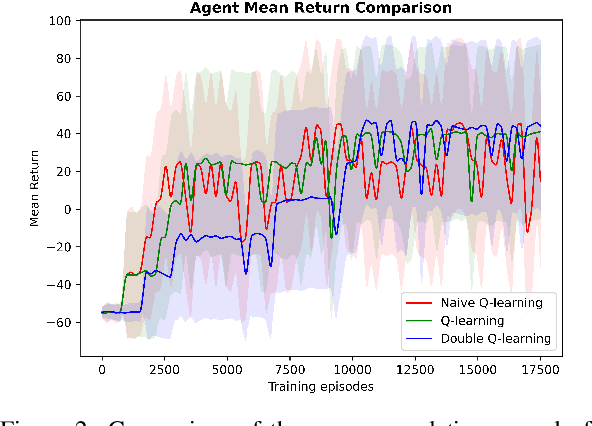
The ongoing rise in cyberattacks and the lack of skilled professionals in the cybersecurity domain to combat these attacks show the need for automated tools capable of detecting an attack with good performance. Attackers disguise their actions and launch attacks that consist of multiple actions, which are difficult to detect. Therefore, improving defensive tools requires their calibration against a well-trained attacker. In this work, we propose a model of an attacking agent and environment and evaluate its performance using basic Q-Learning, Naive Q-learning, and DoubleQ-Learning, all of which are variants of Q-Learning. The attacking agent is trained with the goal of exfiltrating data whereby all the hosts in the network have a non-zero detection probability. Results show that the DoubleQ-Learning agent has the best overall performance rate by successfully achieving the goal in $70\%$ of the interactions.