Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobally Optimal Inverse Kinematics as a Quadratic Program
Dec 25, 2023

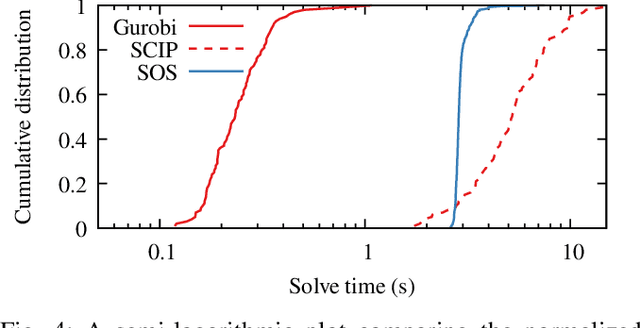
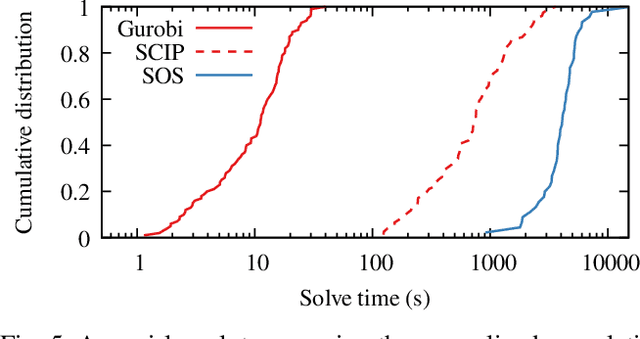
We show how to compute globally optimal solutions to inverse kinematics (IK) by formulating the problem as an indefinite quadratically constrained quadratic program. Our approach makes it feasible to solve IK instances of generic redundant manipulators. We demonstrate the performance on randomly generated designs and on real-world robots with up to ten revolute joints. The same technique can be used for manipulator design by introducing kinematic parameters as variables.
Via