 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Nearest Neighbors Networks
Oct 30, 2018
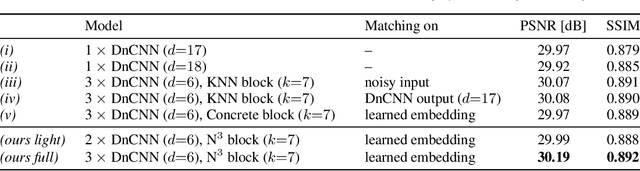


Non-local methods exploiting the self-similarity of natural signals have been well studied, for example in image analysis and restoration. Existing approaches, however, rely on k-nearest neighbors (KNN) matching in a fixed feature space. The main hurdle in optimizing this feature space w.r.t. application performance is the non-differentiability of the KNN selection rule. To overcome this, we propose a continuous deterministic relaxation of KNN selection that maintains differentiability w.r.t. pairwise distances, but retains the original KNN as the limit of a temperature parameter approaching zero. To exploit our relaxation, we propose the neural nearest neighbors block (N3 block), a novel non-local processing layer that leverages the principle of self-similarity and can be used as building block in modern neural network architectures. We show its effectiveness for the set reasoning task of correspondence classification as well as for image restoration, including image denoising and single image super-resolution, where we outperform strong convolutional neural network (CNN) baselines and recent non-local models that rely on KNN selection in hand-chosen features spaces.
Stochastic Variational Inference with Gradient Linearization
Mar 28, 2018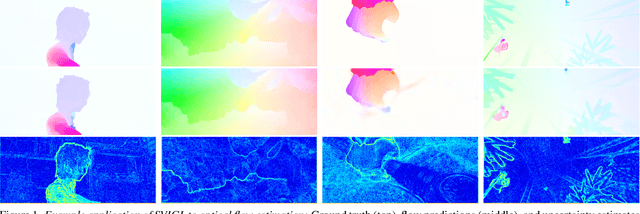

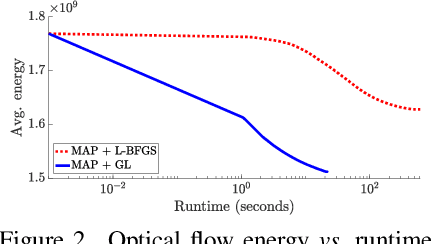

Variational inference has experienced a recent surge in popularity owing to stochastic approaches, which have yielded practical tools for a wide range of model classes. A key benefit is that stochastic variational inference obviates the tedious process of deriving analytical expressions for closed-form variable updates. Instead, one simply needs to derive the gradient of the log-posterior, which is often much easier. Yet for certain model classes, the log-posterior itself is difficult to optimize using standard gradient techniques. One such example are random field models, where optimization based on gradient linearization has proven popular, since it speeds up convergence significantly and can avoid poor local optima. In this paper we propose stochastic variational inference with gradient linearization (SVIGL). It is similarly convenient as standard stochastic variational inference - all that is required is a local linearization of the energy gradient. Its benefit over stochastic variational inference with conventional gradient methods is a clear improvement in convergence speed, while yielding comparable or even better variational approximations in terms of KL divergence. We demonstrate the benefits of SVIGL in three applications: Optical flow estimation, Poisson-Gaussian denoising, and 3D surface reconstruction.
Robust Multi-Image HDR Reconstruction for the Modulo Camera
Jul 05, 2017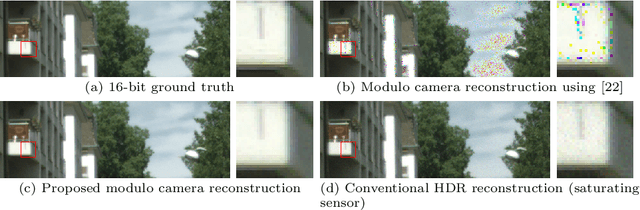
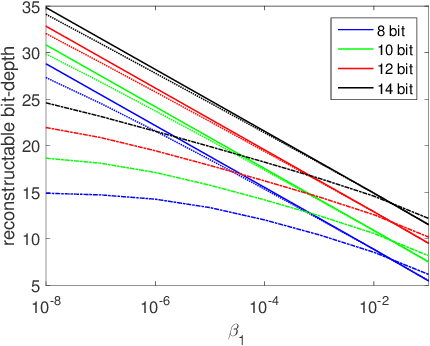
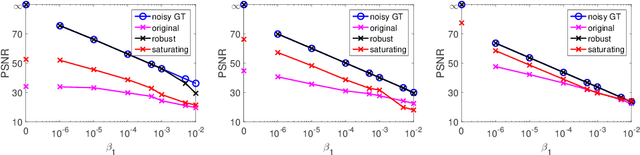
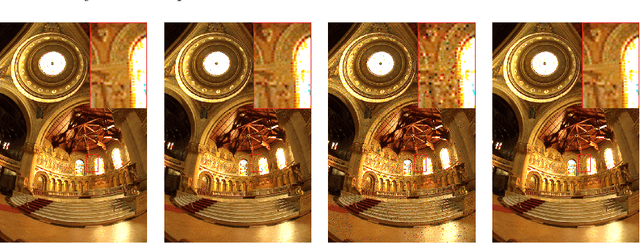
Photographing scenes with high dynamic range (HDR) poses great challenges to consumer cameras with their limited sensor bit depth. To address this, Zhao et al. recently proposed a novel sensor concept - the modulo camera - which captures the least significant bits of the recorded scene instead of going into saturation. Similar to conventional pipelines, HDR images can be reconstructed from multiple exposures, but significantly fewer images are needed than with a typical saturating sensor. While the concept is appealing, we show that the original reconstruction approach assumes noise-free measurements and quickly breaks down otherwise. To address this, we propose a novel reconstruction algorithm that is robust to image noise and produces significantly fewer artifacts. We theoretically analyze correctness as well as limitations, and show that our approach significantly outperforms the baseline on real data.
Benchmarking Denoising Algorithms with Real Photographs
Jul 05, 2017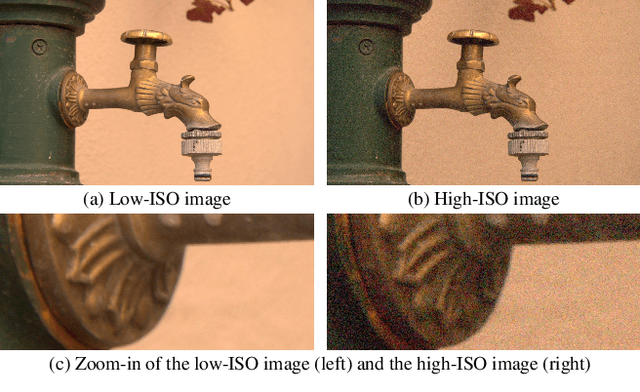
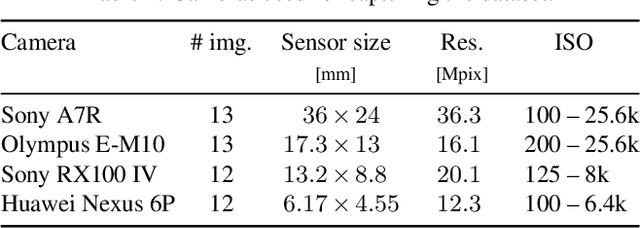


Lacking realistic ground truth data, image denoising techniques are traditionally evaluated on images corrupted by synthesized i.i.d. Gaussian noise. We aim to obviate this unrealistic setting by developing a methodology for benchmarking denoising techniques on real photographs. We capture pairs of images with different ISO values and appropriately adjusted exposure times, where the nearly noise-free low-ISO image serves as reference. To derive the ground truth, careful post-processing is needed. We correct spatial misalignment, cope with inaccuracies in the exposure parameters through a linear intensity transform based on a novel heteroscedastic Tobit regression model, and remove residual low-frequency bias that stems, e.g., from minor illumination changes. We then capture a novel benchmark dataset, the Darmstadt Noise Dataset (DND), with consumer cameras of differing sensor sizes. One interesting finding is that various recent techniques that perform well on synthetic noise are clearly outperformed by BM3D on photographs with real noise. Our benchmark delineates realistic evaluation scenarios that deviate strongly from those commonly used in the scientific literature.