 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Scale SfM with the Distributed Camera Model
Dec 01, 2016

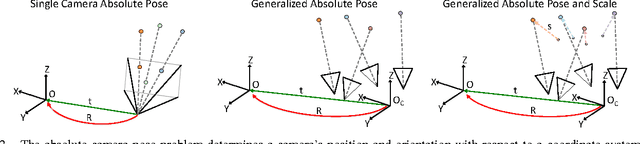

We introduce the distributed camera model, a novel model for Structure-from-Motion (SfM). This model describes image observations in terms of light rays with ray origins and directions rather than pixels. As such, the proposed model is capable of describing a single camera or multiple cameras simultaneously as the collection of all light rays observed. We show how the distributed camera model is a generalization of the standard camera model and describe a general formulation and solution to the absolute camera pose problem that works for standard or distributed cameras. The proposed method computes a solution that is up to 8 times more efficient and robust to rotation singularities in comparison with gDLS. Finally, this method is used in an novel large-scale incremental SfM pipeline where distributed cameras are accurately and robustly merged together. This pipeline is a direct generalization of traditional incremental SfM; however, instead of incrementally adding one camera at a time to grow the reconstruction the reconstruction is grown by adding a distributed camera. Our pipeline produces highly accurate reconstructions efficiently by avoiding the need for many bundle adjustment iterations and is capable of computing a 3D model of Rome from over 15,000 images in just 22 minutes.