 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLighthouse Positioning System: Dataset, Accuracy, and Precision for UAV Research
Apr 23, 2021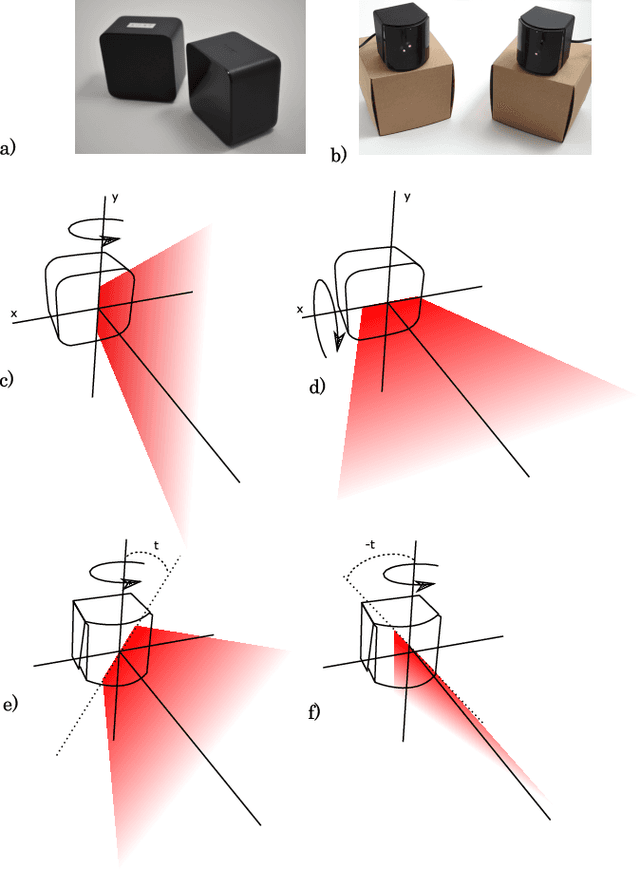
The Lighthouse system was originally developed as tracking system for virtual reality applications. Due to its affordable price, it has also found attractive use-cases in robotics in the past. However, existing works frequently rely on the centralized official tracking software, which make the solution less attractive for UAV swarms. In this work, we consider an open-source tracking software that can run onboard small Unmanned Aerial Vehicles (UAVs) in real-time and enable distributed swarming algorithms. We provide a dataset specifically for the use cases i) flight; and ii) as ground truth for other commonly-used distributed swarming localization systems such as ultra-wideband. We then use this dataset to analyze both accuracy and precision of the Lighthouse system in different use-cases. To our knowledge, we are the first to compare two different Lighthouse hardware versions with a motion capture system and the first to analyze the accuracy using tracking software that runs onboard a microcontroller.