 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePR-CapsNet: Pseudo-Riemannian Capsule Network with Adaptive Curvature Routing for Graph Learning
Dec 09, 2025Capsule Networks (CapsNets) show exceptional graph representation capacity via dynamic routing and vectorized hierarchical representations, but they model the complex geometries of real\-world graphs poorly by fixed\-curvature space due to the inherent geodesical disconnectedness issues, leading to suboptimal performance. Recent works find that non\-Euclidean pseudo\-Riemannian manifolds provide specific inductive biases for embedding graph data, but how to leverage them to improve CapsNets is still underexplored. Here, we extend the Euclidean capsule routing into geodesically disconnected pseudo\-Riemannian manifolds and derive a Pseudo\-Riemannian Capsule Network (PR\-CapsNet), which models data in pseudo\-Riemannian manifolds of adaptive curvature, for graph representation learning. Specifically, PR\-CapsNet enhances the CapsNet with Adaptive Pseudo\-Riemannian Tangent Space Routing by utilizing pseudo\-Riemannian geometry. Unlike single\-curvature or subspace\-partitioning methods, PR\-CapsNet concurrently models hierarchical and cluster or cyclic graph structures via its versatile pseudo\-Riemannian metric. It first deploys Pseudo\-Riemannian Tangent Space Routing to decompose capsule states into spherical\-temporal and Euclidean\-spatial subspaces with diffeomorphic transformations. Then, an Adaptive Curvature Routing is developed to adaptively fuse features from different curvature spaces for complex graphs via a learnable curvature tensor with geometric attention from local manifold properties. Finally, a geometric properties\-preserved Pseudo\-Riemannian Capsule Classifier is developed to project capsule embeddings to tangent spaces and use curvature\-weighted softmax for classification. Extensive experiments on node and graph classification benchmarks show PR\-CapsNet outperforms SOTA models, validating PR\-CapsNet's strong representation power for complex graph structures.
Highly Accurate Robot Calibration Using Adaptive and Momental Bound with Decoupled Weight Decay
Aug 22, 2024

Within the context of intelligent manufacturing, industrial robots have a pivotal function. Nonetheless, extended operational periods cause a decline in their absolute positioning accuracy, preventing them from meeting high precision. To address this issue, this paper presents a novel robot algorithm that combines an adaptive and momental bound algorithm with decoupled weight decay (AdaModW), which has three-fold ideas: a) adopting an adaptive moment estimation (Adam) algorithm to achieve a high convergence rate, b) introducing a hyperparameter into the Adam algorithm to define the length of memory, effectively addressing the issue of the abnormal learning rate, and c) interpolating a weight decay coefficient to improve its generalization. Numerous experiments on an HRS-JR680 industrial robot show that the presented algorithm significantly outperforms state-of-the-art algorithms in robot calibration performance. Thus, in light of its reliability, this algorithm provides an efficient way to address robot calibration concerns.
Using Alternation Direction Method of Multipliers to Enhance robots Calibration Accuracy based on Multi-Planal Constraints
Apr 23, 2023With the widespread application of industrial robots, the problem of absolute positioning accuracy becomes increasingly prominent. To ensure the working state of the robots, researchers commonly adopt calibration techniques to improve its accuracy. However, an industrial robot's working space is mostly restricted in real working environments, making the collected samples fail in covering the actual working space to result in the overall migration data. To address this vital issue, this work proposes a novel industrial robot calibrator that integrates a measurement configurations selection (MCS) method and an alternation-direction-method-of-multipliers with multiple planes constraints (AMPC) algorithm into its working process, whose ideas are three-fold: a) selecting a group of optimal measurement configurations based on the observability index to suppress the measurement noises, b) developing an AMPC algorithm that evidently enhances the calibration accuracy and suppresses the long-tail convergence, and c) proposing an industrial robot calibration algorithm that incorporates MCS and AMPC to optimize an industrial robot's kinematic parameters efficiently. For validating its performance, a public-available dataset (HRS-P) is established on an HRS-JR680 industrial robot. Extensive experimental results demonstrate that the proposed calibrator outperforms several state-of-the-art models in calibration accuracy.
A novel robot calibration method with plane constraint based on dial indicator
Aug 04, 2022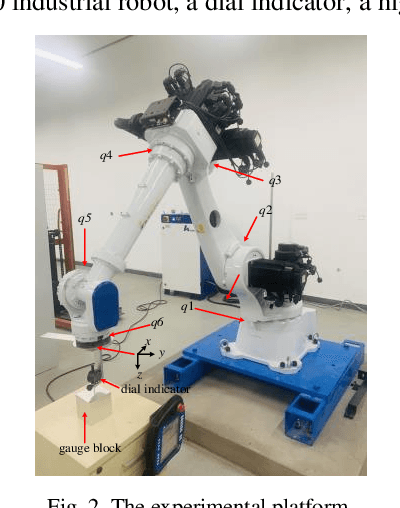
In pace with the electronic technology development and the production technology improvement, industrial robot Give Scope to the Advantage in social services and industrial production. However, due to long-term mechanical wear and structural deformation, the absolute positioning accuracy is low, which greatly hinders the development of manufacturing industry. Calibrating the kinematic parameters of the robot is an effective way to address it. However, the main measuring equipment such as laser trackers and coordinate measuring machines are expensive and need special personnel to operate. Additionally, in the measurement process, due to the influence of many environmental factors, measurement noises are generated, which will affect the calibration accuracy of the robot. Basing on these, we have done the following work: a) developing a robot calibration method based on plane constraint to simplify measurement steps; b) employing Square-root Culture Kalman Filter (SCKF) algorithm for reducing the influence of measurement noises; c) proposing a novel algorithm for identifying kinematic parameters based on SCKF algorithm and Levenberg Marquardt (LM) algorithm to achieve the high calibration accuracy; d) adopting the dial indicator as the measuring equipment for slashing costs. The enough experiments verify the effectiveness of the proposed calibration algorithm and experimental platform.