 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmooth Computation without Input Delay: Robust Tube-Based Model Predictive Control for Robot Manipulator Planning
Mar 09, 2024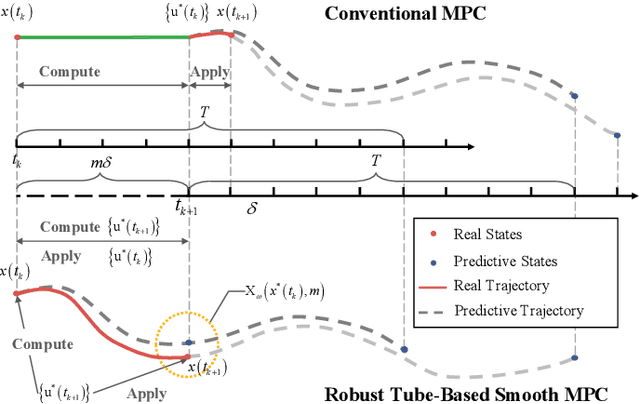



Model Predictive Control (MPC) has exhibited remarkable capabilities in optimizing objectives and meeting constraints. However, the substantial computational burden associated with solving the Optimal Control Problem (OCP) at each triggering instant introduces significant delays between state sampling and control application. These delays limit the practicality of MPC in resource-constrained systems when engaging in complex tasks. The intuition to address this issue in this paper is that by predicting the successor state, the controller can solve the OCP one time step ahead of time thus avoiding the delay of the next action. To this end, we compute deviations between real and nominal system states, predicting forthcoming real states as initial conditions for the imminent OCP solution. Anticipatory computation stores optimal control based on current nominal states, thus mitigating the delay effects. Additionally, we establish an upper bound for linearization error, effectively linearizing the nonlinear system, reducing OCP complexity, and enhancing response speed. We provide empirical validation through two numerical simulations and corresponding real-world robot tasks, demonstrating significant performance improvements and augmented response speed (up to $90\%$) resulting from the seamless integration of our proposed approach compared to conventional time-triggered MPC strategies.