 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolution of Multiview Egocentric Hand Tracking Challenge ECCV2024
Sep 28, 2024


Multi-view egocentric hand tracking is a challenging task and plays a critical role in VR interaction. In this report, we present a method that uses multi-view input images and camera extrinsic parameters to estimate both hand shape and pose. To reduce overfitting to the camera layout, we apply crop jittering and extrinsic parameter noise augmentation. Additionally, we propose an offline neural smoothing post-processing method to further improve the accuracy of hand position and pose. Our method achieves 13.92mm MPJPE on the Umetrack dataset and 21.66mm MPJPE on the HOT3D dataset.
Generalized Maximum Likelihood Estimation for Perspective-n-Point Problem
Aug 04, 2024

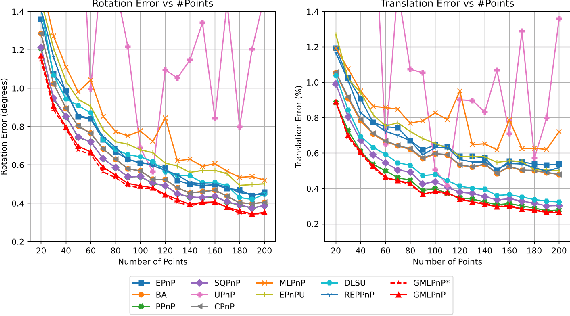

The Perspective-n-Point (PnP) problem has been widely studied in the literature and applied in various vision-based pose estimation scenarios. However, existing methods ignore the anisotropy uncertainty of observations, as demonstrated in several real-world datasets in this paper. This oversight may lead to suboptimal and inaccurate estimation, particularly in the presence of noisy observations. To this end, we propose a generalized maximum likelihood PnP solver, named GMLPnP, that minimizes the determinant criterion by iterating the GLS procedure to estimate the pose and uncertainty simultaneously. Further, the proposed method is decoupled from the camera model. Results of synthetic and real experiments show that our method achieves better accuracy in common pose estimation scenarios, GMLPnP improves rotation/translation accuracy by 4.7%/2.0% on TUM-RGBD and 18.6%/18.4% on KITTI-360 dataset compared to the best baseline. It is more accurate under very noisy observations in a vision-based UAV localization task, outperforming the best baseline by 34.4% in translation estimation accuracy.