 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniDRL: Robust Pedestrian Detection using Deep Reinforcement Learning on Omnidirectional Cameras
Mar 02, 2019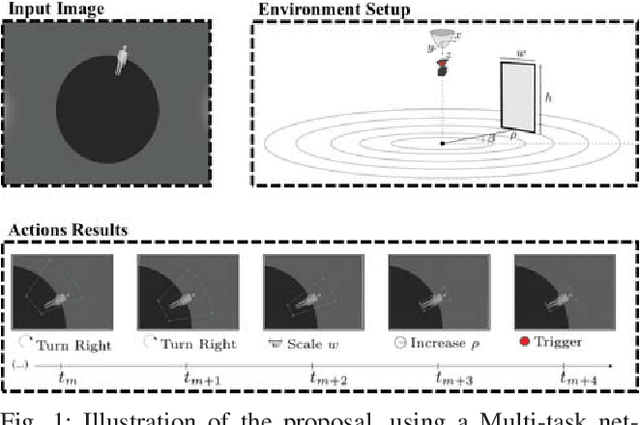
Pedestrian detection is one of the most explored topics in computer vision and robotics. The use of deep learning methods allowed the development of new and highly competitive algorithms. Deep Reinforcement Learning has proved to be within the state-of-the-art in terms of both detection in perspective cameras and robotics applications. However, for detection in omnidirectional cameras, the literature is still scarce, mostly because of their high levels of distortion. This paper presents a novel and efficient technique for robust pedestrian detection in omnidirectional images. The proposed method uses deep Reinforcement Learning that takes advantage of the distortion in the image. By considering the 3D bounding boxes and their distorted projections into the image, our method is able to provide the pedestrian's position in the world, in contrast to the image positions provided by most state-of-the-art methods for perspective cameras. Our method avoids the need of pre-processing steps to remove the distortion, which is computationally expensive. Beyond the novel solution, our method compares favorably with the state-of-the-art methodologies that do not consider the underlying distortion for the detection task.