 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Optimal Trajectory Planning in Highway Scenarios using Basis-Spline Parameterization
Oct 05, 2023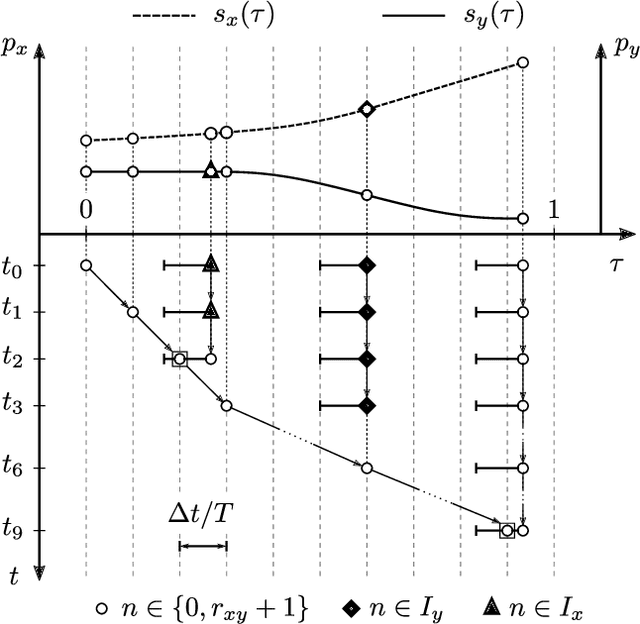
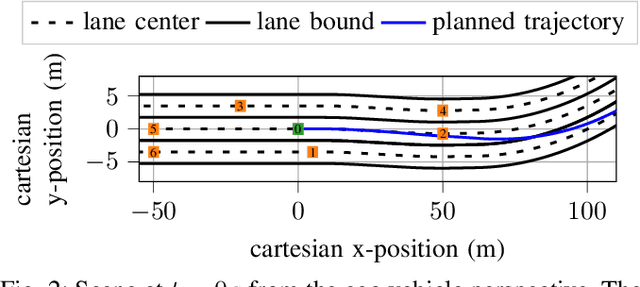
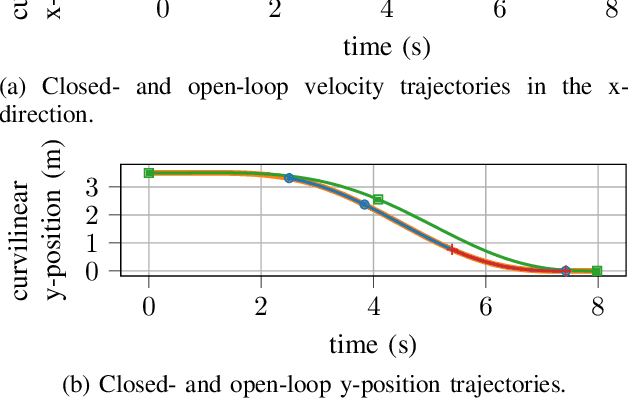
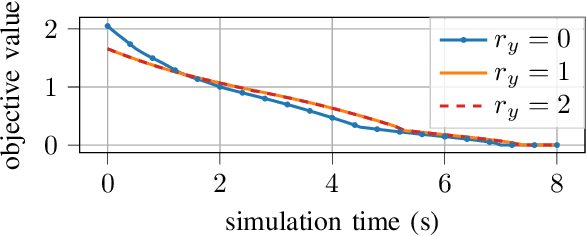
Basis splines enable a time-continuous feasibility check with a finite number of constraints. Constraints apply to the whole trajectory for motion planning applications that require a collision-free and dynamically feasible trajectory. Existing motion planners that rely on gradient-based optimization apply time scaling to implement a shrinking planning horizon. They neither guarantee a recursively feasible trajectory nor enable reaching two terminal manifold parts at different time scales. This paper proposes a nonlinear optimization problem that addresses the drawbacks of existing approaches. Therefore, the spline breakpoints are included in the optimization variables. Transformations between spline bases are implemented so a sparse problem formulation is achieved. A strategy for breakpoint removal enables the convergence into a terminal manifold. The evaluation in an overtaking scenario shows the influence of the breakpoint number on the solution quality and the time required for optimization.
Real Time Emulation of Parametric Guitar Tube Amplifier With Long Short Term Memory Neural Network
Apr 19, 2018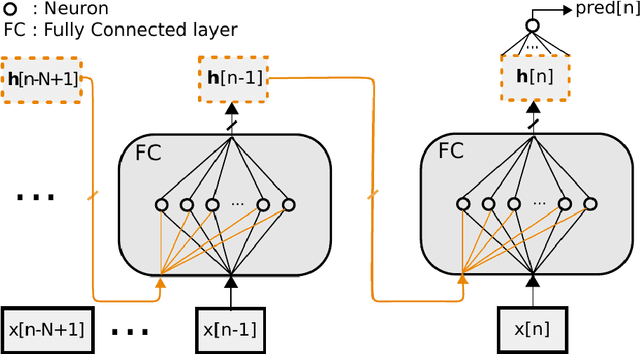
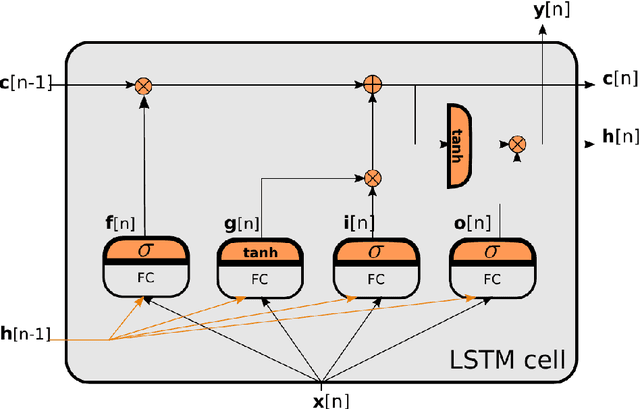
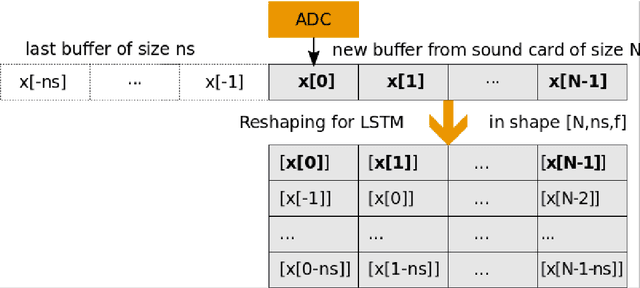
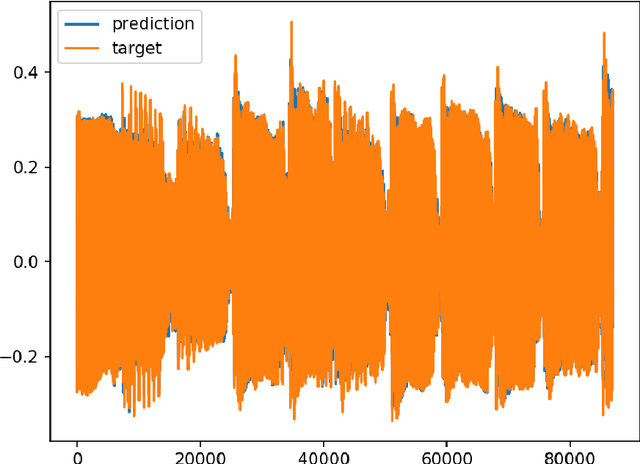
Numerous audio systems for musicians are expensive and bulky. Therefore, it could be advantageous to model them and to replace them by computer emulation. In guitar players' world, audio systems could have a desirable nonlinear behavior (distortion effects). It is thus difficult to find a simple model to emulate them in real time. Volterra series model and its subclass are usual ways to model nonlinear systems. Unfortunately, these systems are difficult to identify in an analytic way. In this paper we propose to take advantage of the new progress made in neural networks to emulate them in real time. We show that an accurate emulation can be reached with less than 1% of root mean square error between the signal coming from a tube amplifier and the output of the neural network. Moreover, the research has been extended to model the Gain parameter of the amplifier.