 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Optimal Trajectory Planning in Highway Scenarios using Basis-Spline Parameterization
Paper and Code
Oct 05, 2023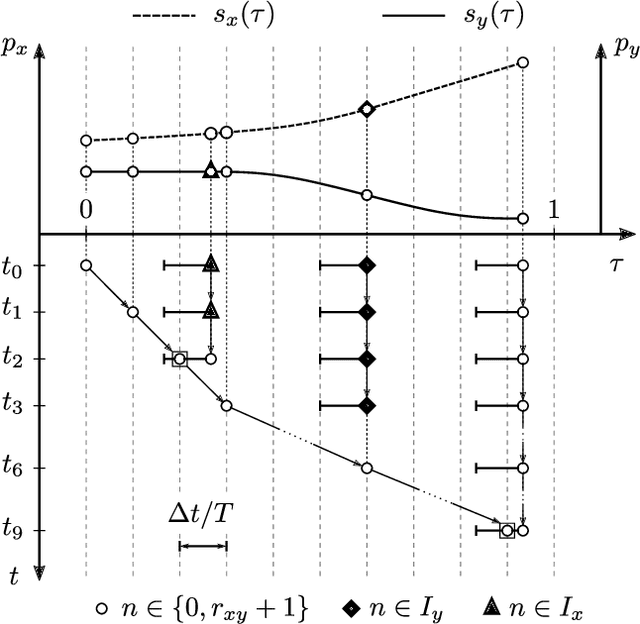
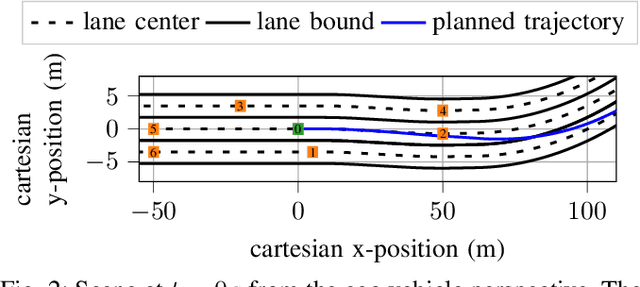
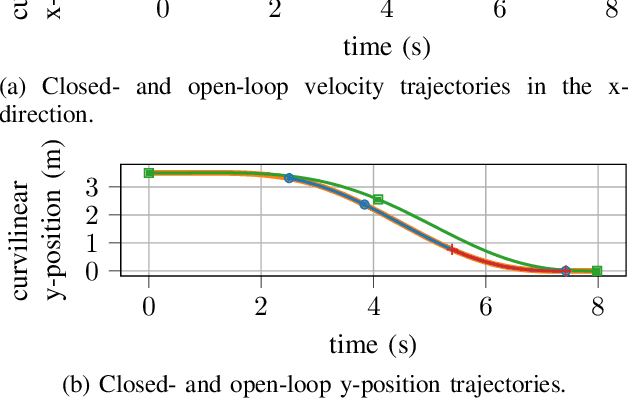
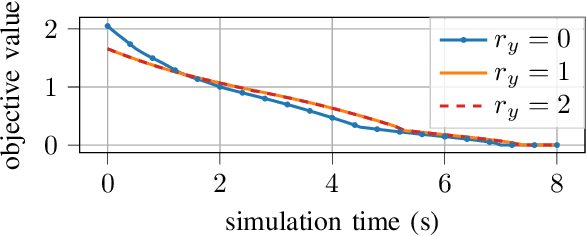
Basis splines enable a time-continuous feasibility check with a finite number of constraints. Constraints apply to the whole trajectory for motion planning applications that require a collision-free and dynamically feasible trajectory. Existing motion planners that rely on gradient-based optimization apply time scaling to implement a shrinking planning horizon. They neither guarantee a recursively feasible trajectory nor enable reaching two terminal manifold parts at different time scales. This paper proposes a nonlinear optimization problem that addresses the drawbacks of existing approaches. Therefore, the spline breakpoints are included in the optimization variables. Transformations between spline bases are implemented so a sparse problem formulation is achieved. A strategy for breakpoint removal enables the convergence into a terminal manifold. The evaluation in an overtaking scenario shows the influence of the breakpoint number on the solution quality and the time required for optimization.