 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree Energy Risk Metrics for Systemically Safe AI: Gatekeeping Multi-Agent Study
Feb 06, 2025We investigate the Free Energy Principle as a foundation for measuring risk in agentic and multi-agent systems. From these principles we introduce a Cumulative Risk Exposure metric that is flexible to differing contexts and needs. We contrast this to other popular theories for safe AI that hinge on massive amounts of data or describing arbitrarily complex world models. In our framework, stakeholders need only specify their preferences over system outcomes, providing straightforward and transparent decision rules for risk governance and mitigation. This framework naturally accounts for uncertainty in both world model and preference model, allowing for decision-making that is epistemically and axiologically humble, parsimonious, and future-proof. We demonstrate this novel approach in a simplified autonomous vehicle environment with multi-agent vehicles whose driving policies are mediated by gatekeepers that evaluate, in an online fashion, the risk to the collective safety in their neighborhood, and intervene through each vehicle's policy when appropriate. We show that the introduction of gatekeepers in an AV fleet, even at low penetration, can generate significant positive externalities in terms of increased system safety.
A simple technique for improving multi-class classification with neural networks
Jan 06, 2016



We present a novel method to perform multi-class pattern classification with neural networks and test it on a challenging 3D hand gesture recognition problem. Our method consists of a standard one-against-all (OAA) classification, followed by another network layer classifying the resulting class scores, possibly augmented by the original raw input vector. This allows the network to disambiguate hard-to-separate classes as the distribution of class scores carries considerable information as well, and is in fact often used for assessing the confidence of a decision. We show that by this approach we are able to significantly boost our results, overall as well as for particular difficult cases, on the hard 10-class gesture classification task.
A pragmatic approach to multi-class classification
Jan 06, 2016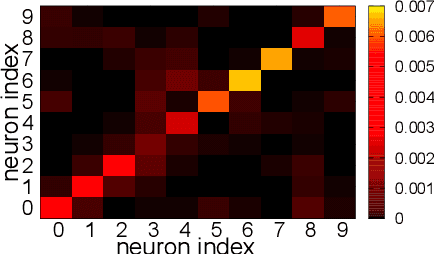
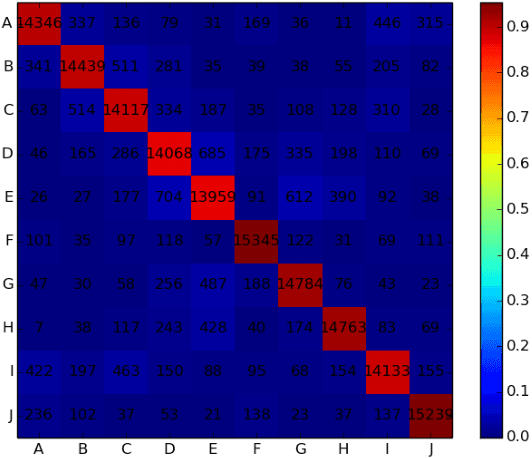
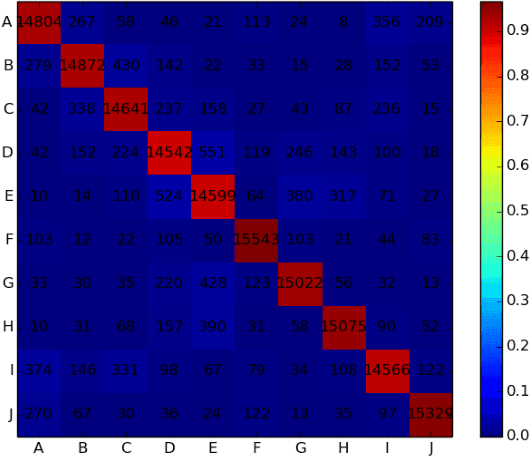
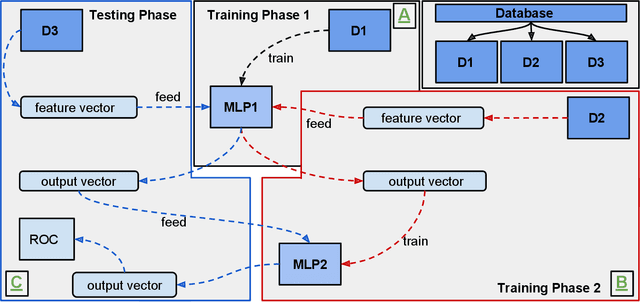
We present a novel hierarchical approach to multi-class classification which is generic in that it can be applied to different classification models (e.g., support vector machines, perceptrons), and makes no explicit assumptions about the probabilistic structure of the problem as it is usually done in multi-class classification. By adding a cascade of additional classifiers, each of which receives the previous classifier's output in addition to regular input data, the approach harnesses unused information that manifests itself in the form of, e.g., correlations between predicted classes. Using multilayer perceptrons as a classification model, we demonstrate the validity of this approach by testing it on a complex ten-class 3D gesture recognition task.