 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning based Autonomous Decision-Making for Cooperative UAVs: A Search and Rescue Real World Application
Feb 27, 2025
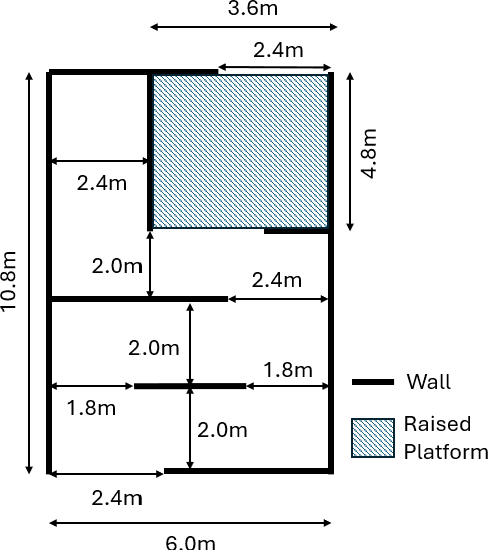

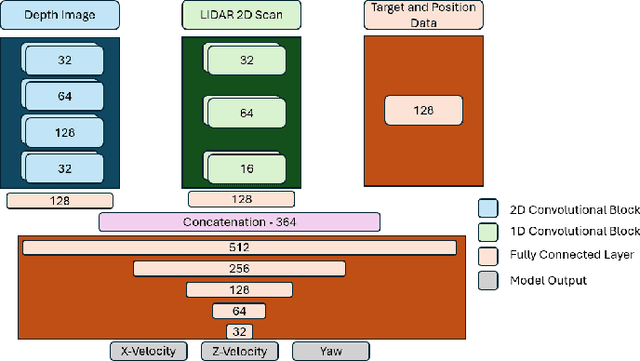
This paper proposes a holistic framework for autonomous guidance, navigation, and task distribution among multi-drone systems operating in Global Navigation Satellite System (GNSS)-denied indoor settings. We advocate for a Deep Reinforcement Learning (DRL)-based guidance mechanism, utilising the Twin Delayed Deep Deterministic Policy Gradient algorithm. To improve the efficiency of the training process, we incorporate an Artificial Potential Field (APF)-based reward structure, enabling the agent to refine its movements, thereby promoting smoother paths and enhanced obstacle avoidance in indoor contexts. Furthermore, we tackle the issue of task distribution among cooperative UAVs through a DRL-trained Graph Convolutional Network (GCN). This GCN represents the interactions between drones and tasks, facilitating dynamic and real-time task allocation that reflects the current environmental conditions and the capabilities of the drones. Such an approach fosters effective coordination and collaboration among multiple drones during search and rescue operations or other exploratory endeavours. Lastly, to ensure precise odometry in environments lacking GNSS, we employ Light Detection And Ranging Simultaneous Localisation and Mapping complemented by a depth camera to mitigate the hallway problem. This integration offers robust localisation and mapping functionalities, thereby enhancing the systems dependability in indoor navigation. The proposed multi-drone framework not only elevates individual navigation capabilities but also optimises coordinated task allocation in complex, obstacle-laden environments. Experimental evaluations conducted in a setup tailored to meet the requirements of the NATO Sapience Autonomous Cooperative Drone Competition demonstrate the efficacy of the proposed system, yielding outstanding results and culminating in a first-place finish in the 2024 Sapience competition.
Explainability in Deep Reinforcement Learning, a Review into Current Methods and Applications
Jul 13, 2022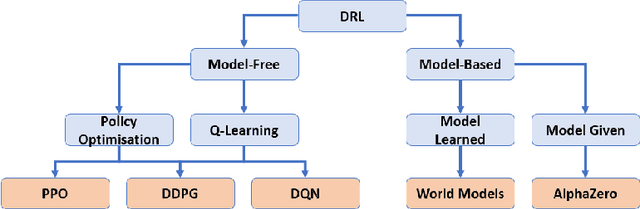
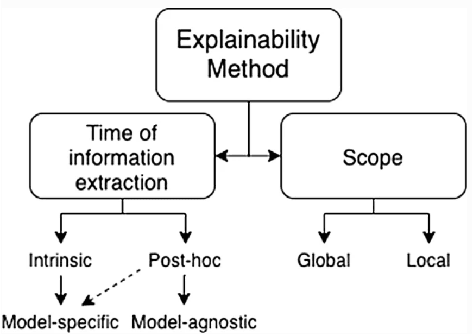
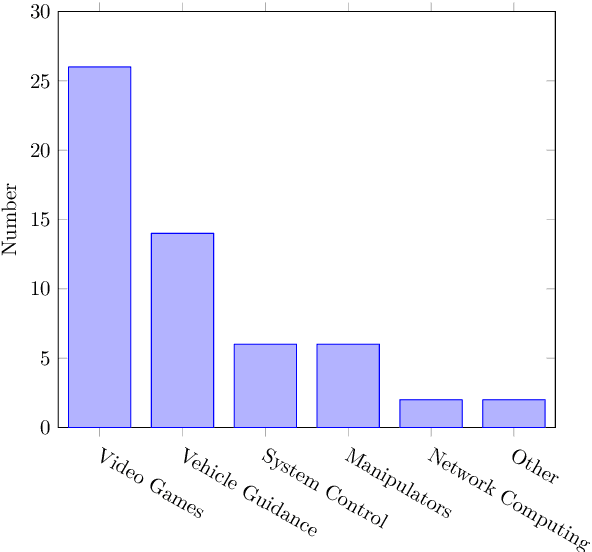
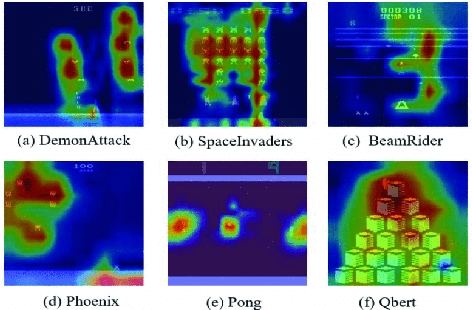
The use of Deep Reinforcement Learning (DRL) schemes has increased dramatically since their first introduction in 2015. Though uses in many different applications are being found they still have a problem with the lack of interpretability. This has bread a lack of understanding and trust in the use of DRL solutions from researchers and the general public. To solve this problem the field of explainable artificial intelligence (XAI) has emerged. This is a variety of different methods that look to open the DRL black boxes, they range from the use of interpretable symbolic decision trees to numerical methods like Shapley Values. This review looks at which methods are being used and what applications they are being used. This is done to identify which models are the best suited to each application or if a method is being underutilised.
Robust Adversarial Attacks Detection based on Explainable Deep Reinforcement Learning For UAV Guidance and Planning
Jun 07, 2022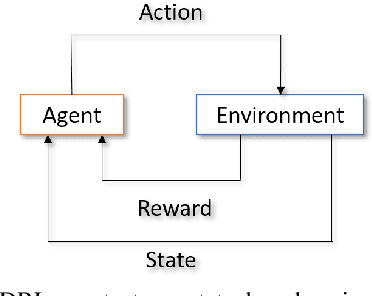

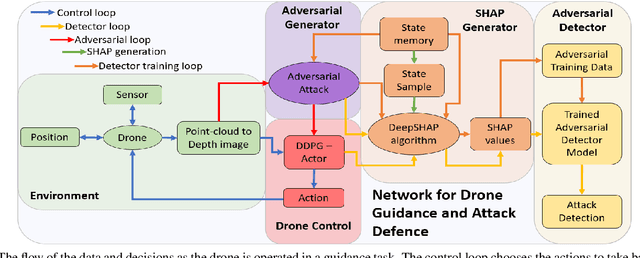
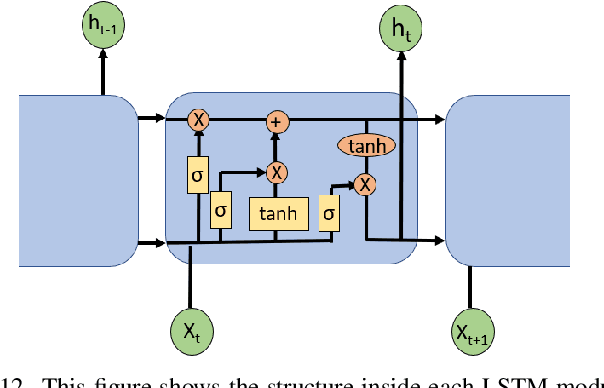
The danger of adversarial attacks to unprotected Uncrewed Aerial Vehicle (UAV) agents operating in public is growing. Adopting AI-based techniques and more specifically Deep Learning (DL) approaches to control and guide these UAVs can be beneficial in terms of performance but add more concerns regarding the safety of those techniques and their vulnerability against adversarial attacks causing the chances of collisions going up as the agent becomes confused. This paper proposes an innovative approach based on the explainability of DL methods to build an efficient detector that will protect these DL schemes and thus the UAVs adopting them from potential attacks. The agent is adopting a Deep Reinforcement Learning (DRL) scheme for guidance and planning. It is formed and trained with a Deep Deterministic Policy Gradient (DDPG) with Prioritised Experience Replay (PER) DRL scheme that utilises Artificial Potential Field (APF) to improve training times and obstacle avoidance performance. The adversarial attacks are generated by Fast Gradient Sign Method (FGSM) and Basic Iterative Method (BIM) algorithms and reduced obstacle course completion rates from 80\% to 35\%. A Realistic Synthetic environment for UAV explainable DRL based planning and guidance including obstacles and adversarial attacks is built. Two adversarial attack detectors are proposed. The first one adopts a Convolutional Neural Network (CNN) architecture and achieves an accuracy in detection of 80\%. The second detector is developed based on a Long Short Term Memory (LSTM) network and achieves an accuracy of 91\% with much faster computing times when compared to the CNN based detector.