 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRSSI-Based Location Classification Using a Particle Filter to Fuse Sensor Estimates
Apr 30, 2021



For Cyper-Physical Production Systems (CPPS), localization is becoming increasingly important as wireless and mobile devices are considered an integral part. While localizing targets in a wireless communication system based on the Received Signal Strength Indicators (RSSIs) is a usual solution, it is limited by sensor quality. We consider the scenario of a car moving in and out of a chamber and propose to use a particle filter for sensor fusion, allowing us to incorporate non-idealities in our model and achieve a high-quality position estimate. Then, we use Machine Learning (ML) to classify the vehicle position. Our results show that the location output of the particle filter is a better input to the classifiers than the raw RSSI data, and we achieve improved accuracy while simultaneously reducing the number of features that the ML has to consider. We also compare the performance of multiple ML algorithms and show that SVMs provide the overall best performance for the given task.
RSSI-Based Machine Learning with Pre- and Post-Processing for Cell-Localization in IWSNs
Apr 30, 2021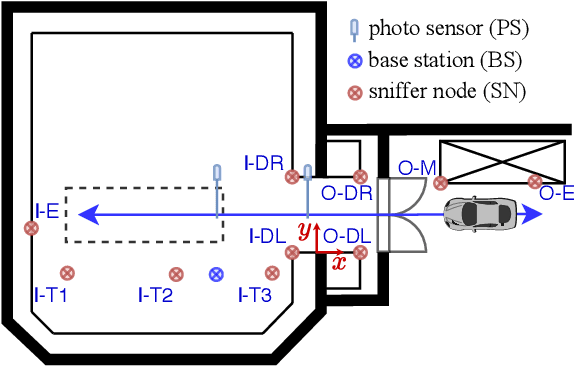
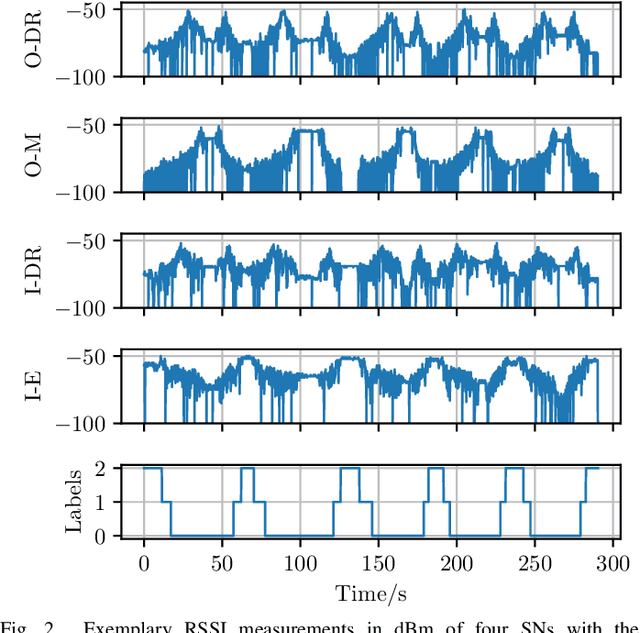

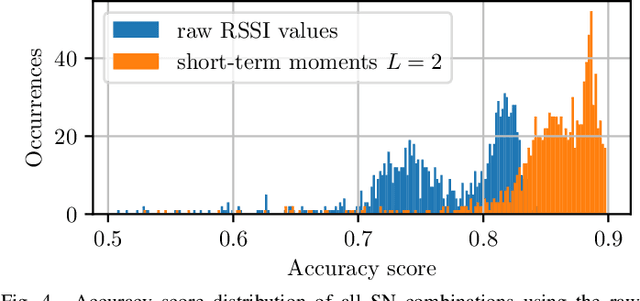
Industrial wireless sensor networks are becoming crucial for modern manufacturing. If the sensors in those networks are mobile, the position information, besides the sensor data itself, can be of high relevance. E.g. this position information can increase the trustability of a wireless sensor measurement by assuring that the sensor is not physically removed, off track, or otherwise compromised. In certain applications, localization information at cell-level, whether the sensor is inside or outside a room or cell, is sufficient. For this, localization using Received Signal Strength Indicator (RSSI) measurements is very popular since RSSI values are available in almost all existing technologies and no direct interaction with the mobile sensor node and its communication in the network is needed. For this scenario, we propose methods to improve the robustness and accuracy of common machine learning classifiers, by using features based on short-term moments and a second classification stage using Hidden Markov Models. With the data from an extensive measurement campaign, we show the applicability of our method and achieve a cell-level localization accuracy of 93.5\%.
On the Parametrization and Statistics of Propagation Graphs
Jan 20, 2021



Propagation graphs (PGs) serve as a frequency-selective, spatially consistent channel model suitable for fast channel simulations in a scattering environment. So far, however, the parametrization of the model, and its consequences, have received little attention. In this contribution, we propose a new parametrization for PGs that adheres to the doubly exponentially decaying cluster structure of the Saleh-Valenzuela (SV) model. We show how to compute the newly proposed internal model parameters based on an approximation of the $K$-factor and the two decay rates from the SV model. Furthermore, via the singular values of multiple-input multiple-output (MIMO) channels, we compare the degrees of freedom (DoF) between our new and another frequently used parametrization. Specifically, we compare the DoF loss when the distance between antennas within the transmitter and receiver arrays or the average distance between scatterers decreases. Based on this comparison, it is shown that, in contrast to the typical parametrization, our newly proposed parametrization loses DoF in both scenarios, as one would expect from a spatially consistent channel model.