 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Testbed for Repeatable Evaluation of Ultra-Wideband Localization Performance
Mar 04, 2026Testing Ultra-Wideband (UWB) systems is challenging, as multiple devices need to coordinate over lossy links and the systems' behavior is influenced by timing, synchronization, and environmental factors. Traditional testing is often insufficient to capture these complex interactions, highlighting the need for an overarching testbed infrastructure that can manage devices, control the environment, and make measurements and test scenarios repeatable. In this work, we present a highly automated testbed architecture built on Robot Operating System Version 2, integrating device management with environmental control and measurement systems. It includes an optical reference system, a controllable Autonomous Guided Vehicle to position devices within the environment, and time synchronization via Network Time Protocol (NTP). The testbed achieves a Root Mean Squared Error of 4.8 mm for positioning repeatability and 0.493$°$ for the orientation, and our NTP-based synchronization approach achieves a timing accuracy of below 1 ms. All testbed functionality can be controlled remotely through simple Python scripts to allow automated orchestration tasks such as conducting complex measurement scenarios. We demonstrate this with a measurement campaign on UWB localization, showing how it enables repeatable, observable, and fully controlled wireless experiments.
RSSI-Based Location Classification Using a Particle Filter to Fuse Sensor Estimates
Apr 30, 2021



For Cyper-Physical Production Systems (CPPS), localization is becoming increasingly important as wireless and mobile devices are considered an integral part. While localizing targets in a wireless communication system based on the Received Signal Strength Indicators (RSSIs) is a usual solution, it is limited by sensor quality. We consider the scenario of a car moving in and out of a chamber and propose to use a particle filter for sensor fusion, allowing us to incorporate non-idealities in our model and achieve a high-quality position estimate. Then, we use Machine Learning (ML) to classify the vehicle position. Our results show that the location output of the particle filter is a better input to the classifiers than the raw RSSI data, and we achieve improved accuracy while simultaneously reducing the number of features that the ML has to consider. We also compare the performance of multiple ML algorithms and show that SVMs provide the overall best performance for the given task.
RSSI-Based Machine Learning with Pre- and Post-Processing for Cell-Localization in IWSNs
Apr 30, 2021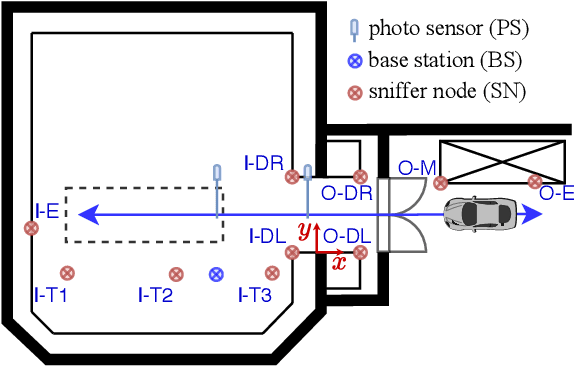
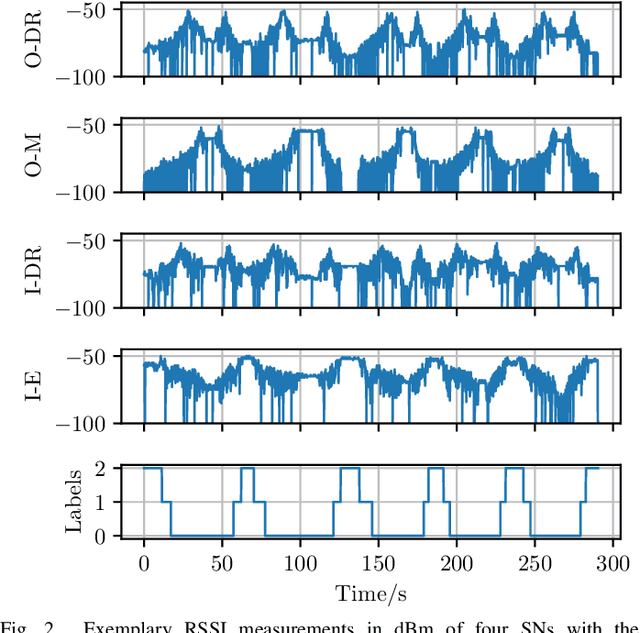

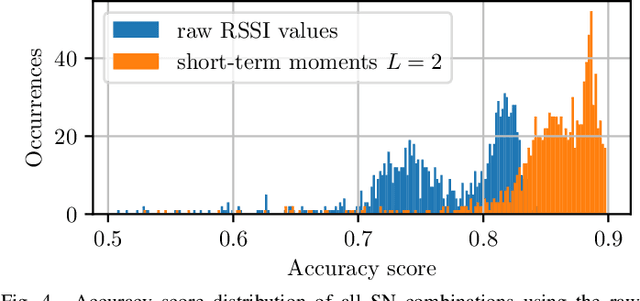
Industrial wireless sensor networks are becoming crucial for modern manufacturing. If the sensors in those networks are mobile, the position information, besides the sensor data itself, can be of high relevance. E.g. this position information can increase the trustability of a wireless sensor measurement by assuring that the sensor is not physically removed, off track, or otherwise compromised. In certain applications, localization information at cell-level, whether the sensor is inside or outside a room or cell, is sufficient. For this, localization using Received Signal Strength Indicator (RSSI) measurements is very popular since RSSI values are available in almost all existing technologies and no direct interaction with the mobile sensor node and its communication in the network is needed. For this scenario, we propose methods to improve the robustness and accuracy of common machine learning classifiers, by using features based on short-term moments and a second classification stage using Hidden Markov Models. With the data from an extensive measurement campaign, we show the applicability of our method and achieve a cell-level localization accuracy of 93.5\%.