 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Nonlinear Model Predictive Control for a Real-World Labyrinth Game
Jun 12, 2024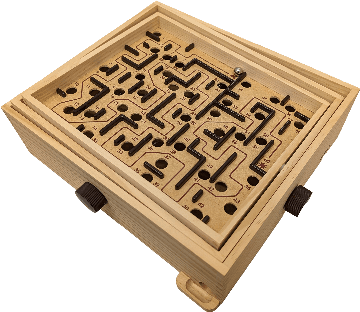
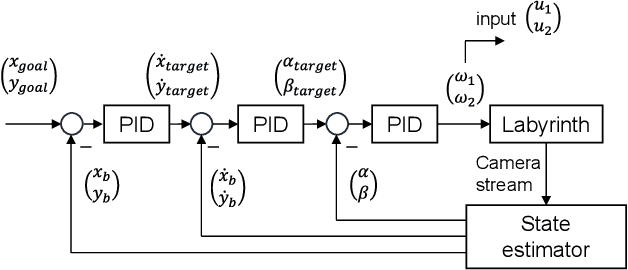
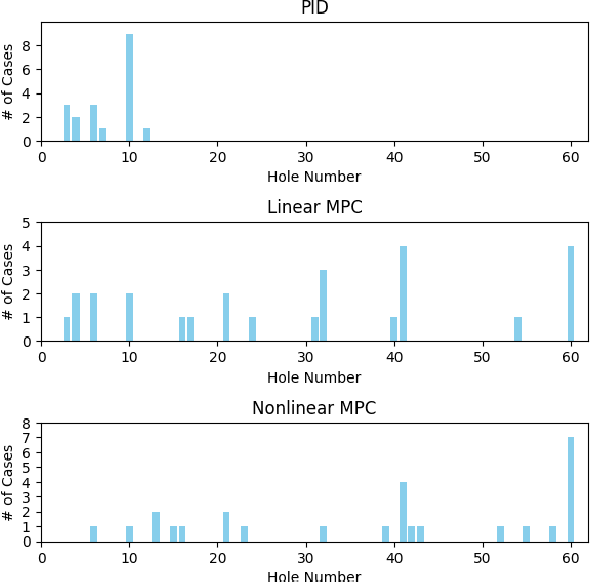
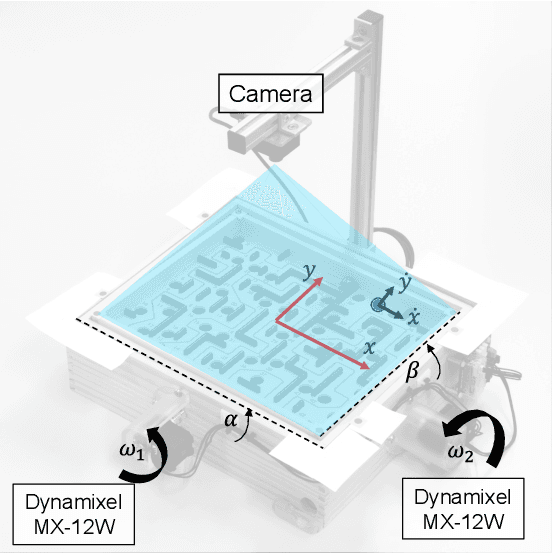
We present a nonlinear non-convex model predictive control approach to solving a real-world labyrinth game. We introduce adaptive nonlinear constraints, representing the non-convex obstacles within the labyrinth. Our method splits the computation-heavy optimization problem into two layers; first, a high-level model predictive controller which incorporates the full problem formulation and finds pseudo-global optimal trajectories at a low frequency. Secondly, a low-level model predictive controller that receives a reduced, computationally optimized version of the optimization problem to follow the given high-level path in real-time. Further, a map of the labyrinth surface irregularities is learned. Our controller is able to handle the major disturbances and model inaccuracies encountered on the labyrinth and outperforms other classical control methods.
Sample-Efficient Learning to Solve a Real-World Labyrinth Game Using Data-Augmented Model-Based Reinforcement Learning
Dec 15, 2023Motivated by the challenge of achieving rapid learning in physical environments, this paper presents the development and training of a robotic system designed to navigate and solve a labyrinth game using model-based reinforcement learning techniques. The method involves extracting low-dimensional observations from camera images, along with a cropped and rectified image patch centered on the current position within the labyrinth, providing valuable information about the labyrinth layout. The learning of a control policy is performed purely on the physical system using model-based reinforcement learning, where the progress along the labyrinth's path serves as a reward signal. Additionally, we exploit the system's inherent symmetries to augment the training data. Consequently, our approach learns to successfully solve a popular real-world labyrinth game in record time, with only 5 hours of real-world training data.
Zero-shot sim-to-real transfer of tactile control policies for aggressive swing-up manipulation
Jan 07, 2021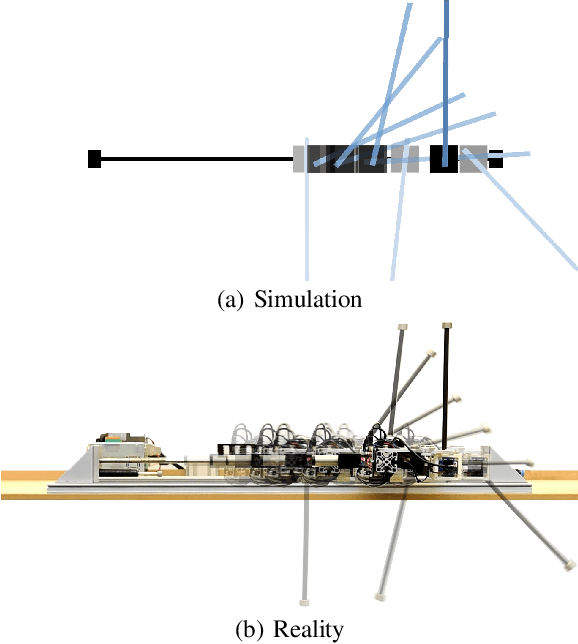
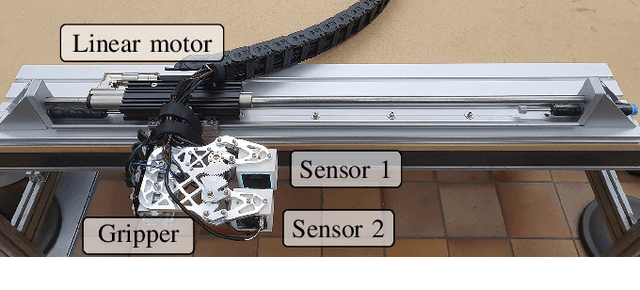
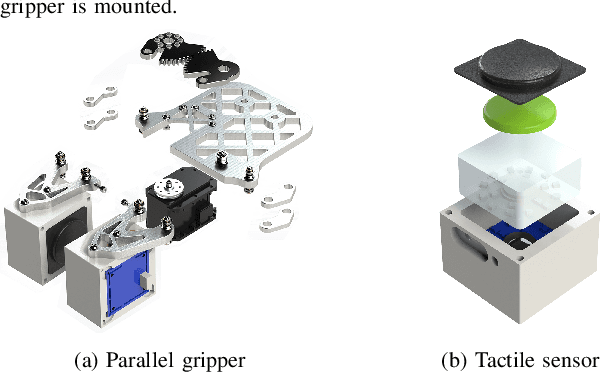
This paper aims to show that robots equipped with a vision-based tactile sensor can perform dynamic manipulation tasks without prior knowledge of all the physical attributes of the objects to be manipulated. For this purpose, a robotic system is presented that is able to swing up poles of different masses, radii and lengths, to an angle of 180 degrees, while relying solely on the feedback provided by the tactile sensor. This is achieved by developing a novel simulator that accurately models the interaction of a pole with the soft sensor. A feedback policy that is conditioned on a sensory observation history, and which has no prior knowledge of the physical features of the pole, is then learned in the aforementioned simulation. When evaluated on the physical system, the policy is able to swing up a wide range of poles that differ significantly in their physical attributes without further adaptation. To the authors' knowledge, this is the first work where a feedback policy from high-dimensional tactile observations is used to control the swing-up manipulation of poles in closed-loop.
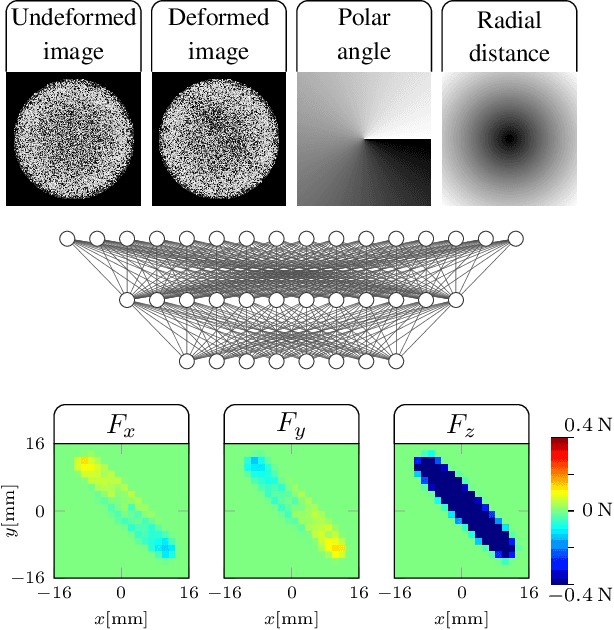
Learning the sense of touch in simulation: a sim-to-real strategy for vision-based tactile sensing
Mar 05, 2020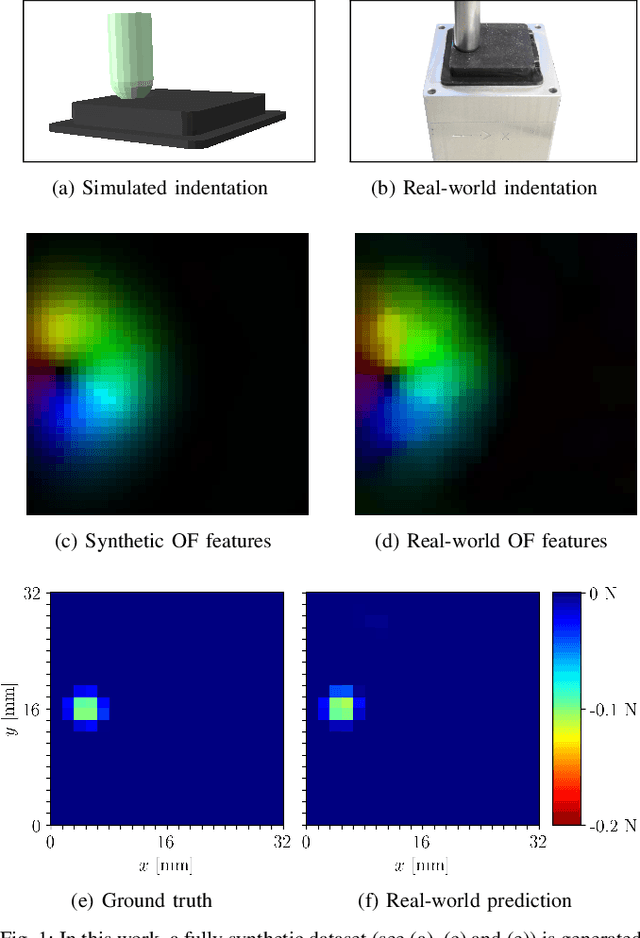
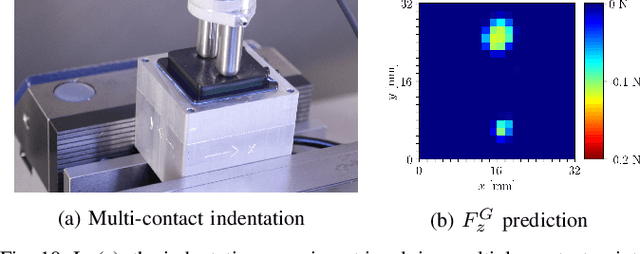
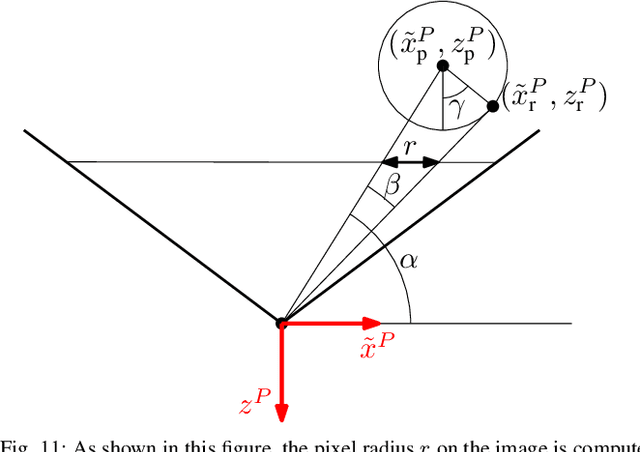
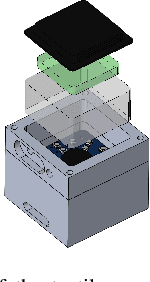
Data-driven approaches to tactile sensing aim to overcome the complexity of accurately modeling contact with soft materials. However, their widespread adoption is impaired by concerns about data efficiency and the capability to generalize when applied to various tasks. This paper focuses on both these aspects with regard to a vision-based tactile sensor, which aims to reconstruct the distribution of the three-dimensional contact forces applied on its soft surface. Accurate models for the soft materials and the camera projection, derived via state-of-the-art techniques in the respective domains, are employed to generate a dataset in simulation. A strategy is proposed to train a tailored deep neural network entirely from the simulation data. The resulting learning architecture is directly transferable across multiple tactile sensors without further training and yields accurate predictions on real data, while showing promising generalization capabilities to unseen contact conditions.