 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Nonlinear Model Predictive Control for a Real-World Labyrinth Game
Paper and Code
Jun 12, 2024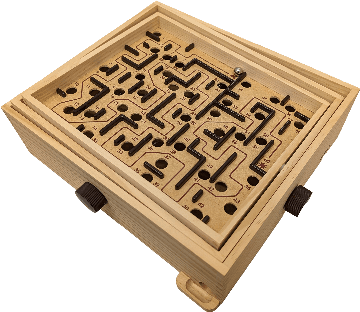
We present a nonlinear non-convex model predictive control approach to solving a real-world labyrinth game. We introduce adaptive nonlinear constraints, representing the non-convex obstacles within the labyrinth. Our method splits the computation-heavy optimization problem into two layers; first, a high-level model predictive controller which incorporates the full problem formulation and finds pseudo-global optimal trajectories at a low frequency. Secondly, a low-level model predictive controller that receives a reduced, computationally optimized version of the optimization problem to follow the given high-level path in real-time. Further, a map of the labyrinth surface irregularities is learned. Our controller is able to handle the major disturbances and model inaccuracies encountered on the labyrinth and outperforms other classical control methods.