 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeFlowMPC: Predictive and Safe Trajectory Planning for Robot Manipulators with Learning-based Policies
Feb 17, 2026The emerging integration of robots into everyday life brings several major challenges. Compared to classical industrial applications, more flexibility is needed in combination with real-time reactivity. Learning-based methods can train powerful policies based on demonstrated trajectories, such that the robot generalizes a task to similar situations. However, these black-box models lack interpretability and rigorous safety guarantees. Optimization-based methods provide these guarantees but lack the required flexibility and generalization capabilities. This work proposes SafeFlowMPC, a combination of flow matching and online optimization to combine the strengths of learning and optimization. This method guarantees safety at all times and is designed to meet the demands of real-time execution by using a suboptimal model-predictive control formulation. SafeFlowMPC achieves strong performance in three real-world experiments on a KUKA 7-DoF manipulator, namely two grasping experiment and a dynamic human-robot object handover experiment. A video of the experiments is available at http://www.acin.tuwien.ac.at/42d6. The code is available at https://github.com/TU-Wien-ACIN-CDS/SafeFlowMPC.
Incremental Language Understanding for Online Motion Planning of Robot Manipulators
Aug 08, 2025Human-robot interaction requires robots to process language incrementally, adapting their actions in real-time based on evolving speech input. Existing approaches to language-guided robot motion planning typically assume fully specified instructions, resulting in inefficient stop-and-replan behavior when corrections or clarifications occur. In this paper, we introduce a novel reasoning-based incremental parser which integrates an online motion planning algorithm within the cognitive architecture. Our approach enables continuous adaptation to dynamic linguistic input, allowing robots to update motion plans without restarting execution. The incremental parser maintains multiple candidate parses, leveraging reasoning mechanisms to resolve ambiguities and revise interpretations when needed. By combining symbolic reasoning with online motion planning, our system achieves greater flexibility in handling speech corrections and dynamically changing constraints. We evaluate our framework in real-world human-robot interaction scenarios, demonstrating online adaptions of goal poses, constraints, or task objectives. Our results highlight the advantages of integrating incremental language understanding with real-time motion planning for natural and fluid human-robot collaboration. The experiments are demonstrated in the accompanying video at www.acin.tuwien.ac.at/42d5.
BoundPlanner: A convex-set-based approach to bounded manipulator trajectory planning
Feb 18, 2025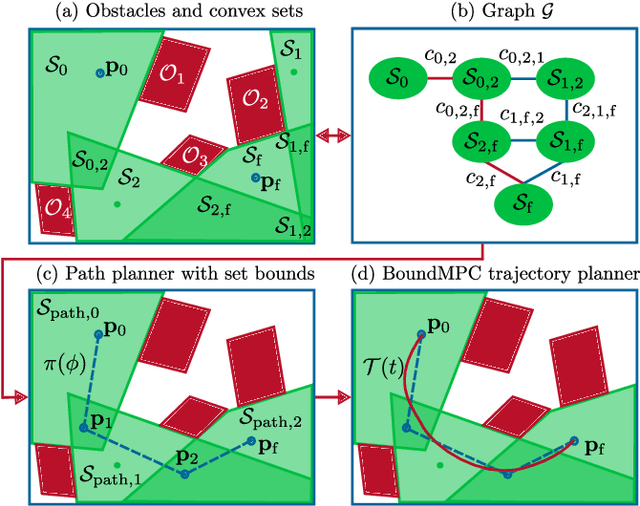
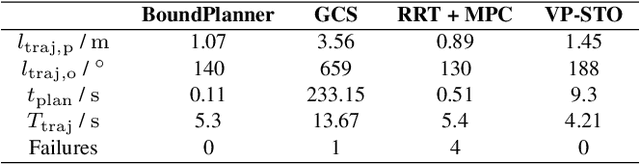
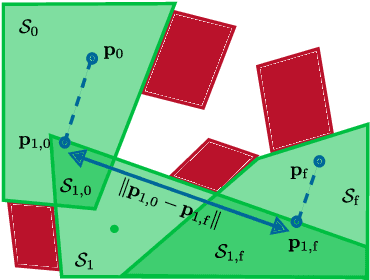

Online trajectory planning enables robot manipulators to react quickly to changing environments or tasks. Many robot trajectory planners exist for known environments but are often too slow for online computations. Current methods in online trajectory planning do not find suitable trajectories in challenging scenarios that respect the limits of the robot and account for collisions. This work proposes a trajectory planning framework consisting of the novel Cartesian path planner based on convex sets, called BoundPlanner, and the online trajectory planner BoundMPC. BoundPlanner explores and maps the collision-free space using convex sets to compute a reference path with bounds. BoundMPC is extended in this work to handle convex sets for path deviations, which allows the robot to optimally follow the path within the bounds while accounting for the robot's kinematics. Collisions of the robot's kinematic chain are considered by a novel convex-set-based collision avoidance formulation independent on the number of obstacles. Simulations and experiments with a 7-DoF manipulator show the performance of the proposed planner compared to state-of-the-art methods. The source code is available at github.com/Thieso/BoundPlanner and videos of the experiments can be found at www.acin.tuwien.ac.at/42d4
Model Predictive Trajectory Planning for Human-Robot Handovers
Apr 11, 2024This work develops a novel trajectory planner for human-robot handovers. The handover requirements can naturally be handled by a path-following-based model predictive controller, where the path progress serves as a progress measure of the handover. Moreover, the deviations from the path are used to follow human motion by adapting the path deviation bounds with a handover location prediction. A Gaussian process regression model, which is trained on known handover trajectories, is employed for this prediction. Experiments with a collaborative 7-DoF robotic manipulator show the effectiveness and versatility of the proposed approach.
* 8 pages, 6 figures, Proceedings available under https://www.vdi-mechatroniktagung.rwth-aachen.de/global/show_document.asp?id=aaaaaaaacjcayqj&download=1
BoundMPC: Cartesian Trajectory Planning with Error Bounds based on Model Predictive Control in the Joint Space
Jan 10, 2024This work presents a novel online model-predictive trajectory planner for robotic manipulators called BoundMPC. This planner allows the collision-free following of Cartesian reference paths in the end-effector's position and orientation, including via-points, within desired asymmetric bounds of the orthogonal path error. The path parameter synchronizes the position and orientation reference paths. The decomposition of the path error into the tangential direction, describing the path progress, and the orthogonal direction, which represents the deviation from the path, is well known for the position from the path-following control in the literature. This paper extends this idea to the orientation by utilizing the Lie theory of rotations. Moreover, the orthogonal error plane is further decomposed into basis directions to define asymmetric Cartesian error bounds easily. Using piecewise linear position and orientation reference paths with via-points is computationally very efficient and allows replanning the pose trajectories during the robot's motion. This feature makes it possible to use this planner for dynamically changing environments and varying goals. The flexibility and performance of BoundMPC are experimentally demonstrated by two scenarios on a 7-DoF Kuka LBR iiwa 14 R820 robot. The first scenario shows the transfer of a larger object from a start to a goal pose through a confined space where the object must be tilted. The second scenario deals with grasping an object from a table where the grasping point changes during the robot's motion, and collisions with other obstacles in the scene must be avoided.