 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping Tractography Across Subjects
Jan 29, 2016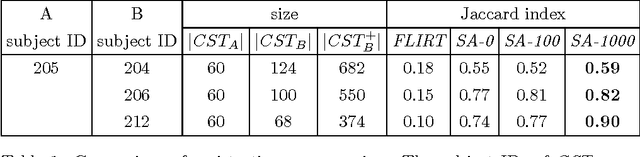

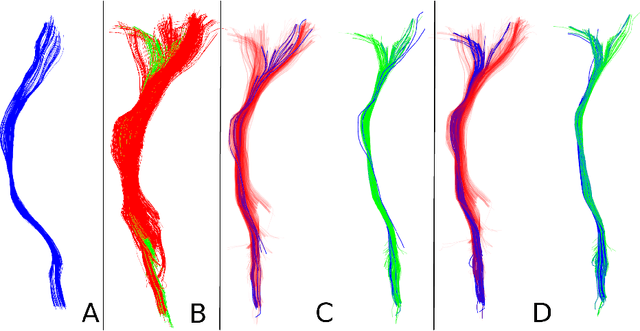
Diffusion magnetic resonance imaging (dMRI) and tractography provide means to study the anatomical structures within the white matter of the brain. When studying tractography data across subjects, it is usually necessary to align, i.e. to register, tractographies together. This registration step is most often performed by applying the transformation resulting from the registration of other volumetric images (T1, FA). In contrast with registration methods that "transform" tractographies, in this work, we try to find which streamline in one tractography correspond to which streamline in the other tractography, without any transformation. In other words, we try to find a "mapping" between the tractographies. We propose a graph-based solution for the tractography mapping problem and we explain similarities and differences with the related well-known graph matching problem. Specifically, we define a loss function based on the pairwise streamline distance and reformulate the mapping problem as combinatorial optimization of that loss function. We show preliminary promising results where we compare the proposed method, implemented with simulated annealing, against a standard registration techniques in a task of segmentation of the corticospinal tract.
The Approximation of the Dissimilarity Projection
Apr 02, 2015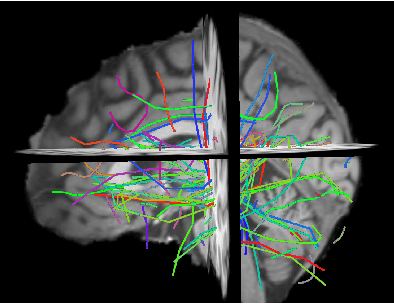

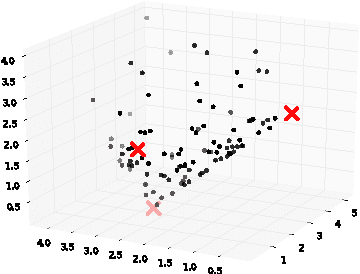
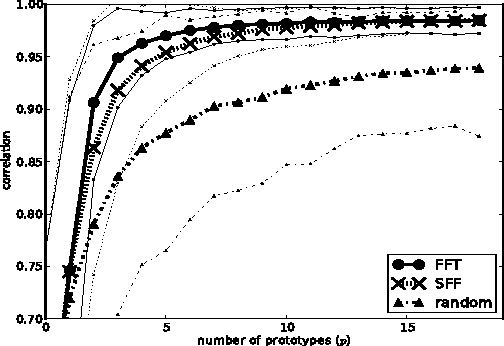
Diffusion magnetic resonance imaging (dMRI) data allow to reconstruct the 3D pathways of axons within the white matter of the brain as a tractography. The analysis of tractographies has drawn attention from the machine learning and pattern recognition communities providing novel challenges such as finding an appropriate representation space for the data. Many of the current learning algorithms require the input to be from a vectorial space. This requirement contrasts with the intrinsic nature of the tractography because its basic elements, called streamlines or tracks, have different lengths and different number of points and for this reason they cannot be directly represented in a common vectorial space. In this work we propose the adoption of the dissimilarity representation which is an Euclidean embedding technique defined by selecting a set of streamlines called prototypes and then mapping any new streamline to the vector of distances from prototypes. We investigate the degree of approximation of this projection under different prototype selection policies and prototype set sizes in order to characterise its use on tractography data. Additionally we propose the use of a scalable approximation of the most effective prototype selection policy that provides fast and accurate dissimilarity approximations of complete tractographies.