 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting socially interacting groups using f-formation: A survey of taxonomy, methods, datasets, applications, challenges, and future research directions
Aug 13, 2021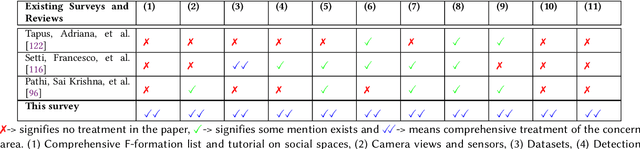
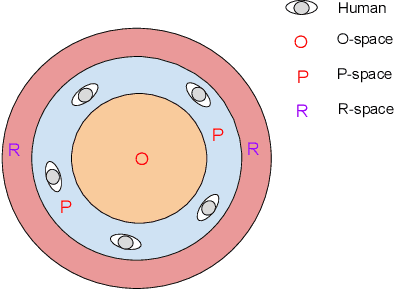
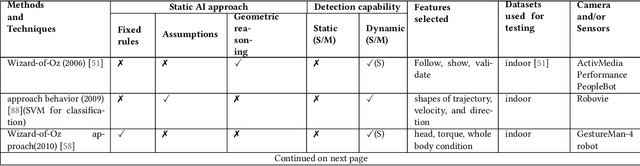
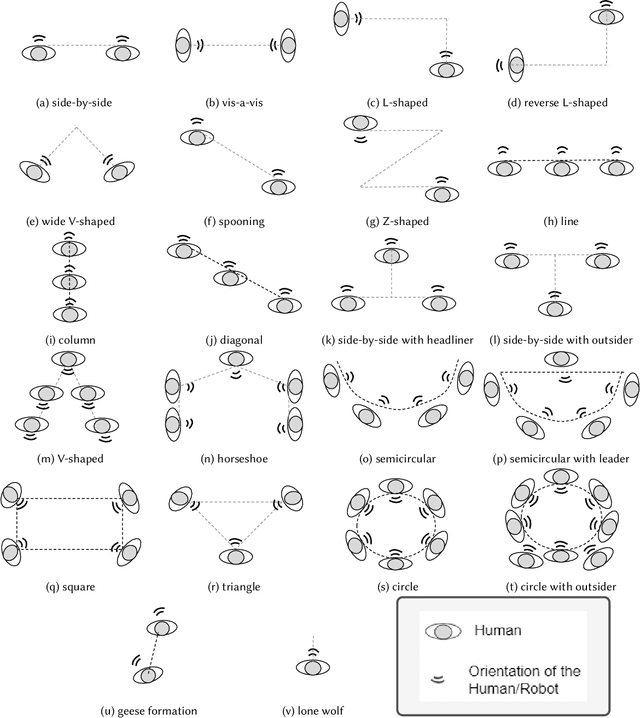
Robots in our daily surroundings are increasing day by day. Their usability and acceptability largely depend on their explicit and implicit interaction capability with fellow human beings. As a result, social behavior is one of the most sought-after qualities that a robot can possess. However, there is no specific aspect and/or feature that defines socially acceptable behavior and it largely depends on the situation, application, and society. In this article, we investigate one such social behavior for collocated robots. Imagine a group of people is interacting with each other and we want to join the group. We as human beings do it in a socially acceptable manner, i.e., within the group, we do position ourselves in such a way that we can participate in the group activity without disturbing/obstructing anybody. To possess such a quality, first, a robot needs to determine the formation of the group and then determine a position for itself, which we humans do implicitly. The theory of f-formation can be utilized for this purpose. As the types of formations can be very diverse, detecting the social groups is not a trivial task. In this article, we provide a comprehensive survey of the existing work on social interaction and group detection using f-formation for robotics and other applications. We also put forward a novel holistic survey framework combining all the possible concerns and modules relevant to this problem. We define taxonomies based on methods, camera views, datasets, detection capabilities and scale, evaluation approaches, and application areas. We discuss certain open challenges and limitations in current literature along with possible future research directions based on this framework. In particular, we discuss the existing methods/techniques and their relative merits and demerits, applications, and provide a set of unsolved but relevant problems in this domain.
Let me join you! Real-time F-formation recognition by a socially aware robot
Aug 23, 2020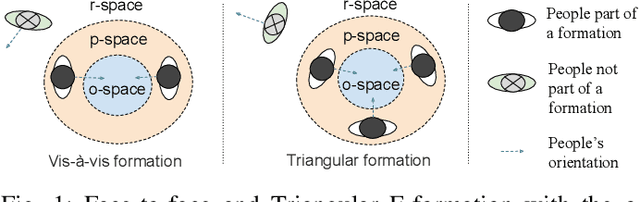

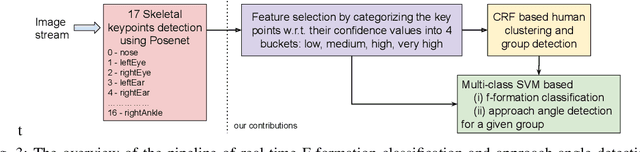

This paper presents a novel architecture to detect social groups in real-time from a continuous image stream of an ego-vision camera. F-formation defines social orientations in space where two or more person tends to communicate in a social place. Thus, essentially, we detect F-formations in social gatherings such as meetings, discussions, etc. and predict the robot's approach angle if it wants to join the social group. Additionally, we also detect outliers, i.e., the persons who are not part of the group under consideration. Our proposed pipeline consists of -- a) a skeletal key points estimator (a total of 17) for the detected human in the scene, b) a learning model (using a feature vector based on the skeletal points) using CRF to detect groups of people and outlier person in a scene, and c) a separate learning model using a multi-class Support Vector Machine (SVM) to predict the exact F-formation of the group of people in the current scene and the angle of approach for the viewing robot. The system is evaluated using two data-sets. The results show that the group and outlier detection in a scene using our method establishes an accuracy of 91%. We have made rigorous comparisons of our systems with a state-of-the-art F-formation detection system and found that it outperforms the state-of-the-art by 29% for formation detection and 55% for combined detection of the formation and approach angle.