 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAncestral Reinforcement Learning: Unifying Zeroth-Order Optimization and Genetic Algorithms for Reinforcement Learning
Aug 18, 2024
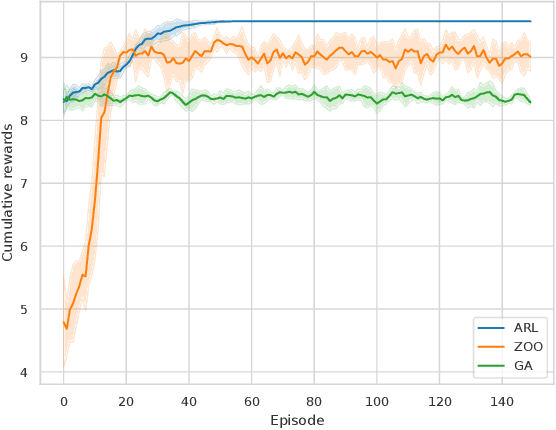

Reinforcement Learning (RL) offers a fundamental framework for discovering optimal action strategies through interactions within unknown environments. Recent advancement have shown that the performance and applicability of RL can significantly be enhanced by exploiting a population of agents in various ways. Zeroth-Order Optimization (ZOO) leverages an agent population to estimate the gradient of the objective function, enabling robust policy refinement even in non-differentiable scenarios. As another application, Genetic Algorithms (GA) boosts the exploration of policy landscapes by mutational generation of policy diversity in an agent population and its refinement by selection. A natural question is whether we can have the best of two worlds that the agent population can have. In this work, we propose Ancestral Reinforcement Learning (ARL), which synergistically combines the robust gradient estimation of ZOO with the exploratory power of GA. The key idea in ARL is that each agent within a population infers gradient by exploiting the history of its ancestors, i.e., the ancestor population in the past, while maintaining the diversity of policies in the current population as in GA. We also theoretically reveal that the populational search in ARL implicitly induces the KL-regularization of the objective function, resulting in the enhanced exploration. Our results extend the applicability of populational algorithms for RL.
Integrating GNN and Neural ODEs for Estimating Two-Body Interactions in Mixed-Species Collective Motion
May 26, 2024

Analyzing the motion of multiple biological agents, be it cells or individual animals, is pivotal for the understanding of complex collective behaviors. With the advent of advanced microscopy, detailed images of complex tissue formations involving multiple cell types have become more accessible in recent years. However, deciphering the underlying rules that govern cell movements is far from trivial. Here, we present a novel deep learning framework to estimate the underlying equations of motion from observed trajectories, a pivotal step in decoding such complex dynamics. Our framework integrates graph neural networks with neural differential equations, enabling effective prediction of two-body interactions based on the states of the interacting entities. We demonstrate the efficacy of our approach through two numerical experiments. First, we used a simulated data from a toy model to tune the hyperparameters. Based on the obtained hyperparameters, we then applied this approach to a more complex model that describes interacting cells of cellular slime molds. Our results show that the proposed method can accurately estimate the function of two-body interactions, thereby precisely replicating both individual and collective behaviors within these systems.
Information geometric bound on general chemical reaction networks
Sep 19, 2023



We investigate the dynamics of chemical reaction networks (CRNs) with the goal of deriving an upper bound on their reaction rates. This task is challenging due to the nonlinear nature and discrete structure inherent in CRNs. To address this, we employ an information geometric approach, using the natural gradient, to develop a nonlinear system that yields an upper bound for CRN dynamics. We validate our approach through numerical simulations, demonstrating faster convergence in a specific class of CRNs. This class is characterized by the number of chemicals, the maximum value of stoichiometric coefficients of the chemical reactions, and the number of reactions. We also compare our method to a conventional approach, showing that the latter cannot provide an upper bound on reaction rates of CRNs. While our study focuses on CRNs, the ubiquity of hypergraphs in fields from natural sciences to engineering suggests that our method may find broader applications, including in information science.
Mol-PECO: a deep learning model to predict human olfactory perception from molecular structures
May 21, 2023While visual and auditory information conveyed by wavelength of light and frequency of sound have been decoded, predicting olfactory information encoded by the combination of odorants remains challenging due to the unknown and potentially discontinuous perceptual space of smells and odorants. Herein, we develop a deep learning model called Mol-PECO (Molecular Representation by Positional Encoding of Coulomb Matrix) to predict olfactory perception from molecular structures. Mol-PECO updates the learned atom embedding by directional graph convolutional networks (GCN), which model the Laplacian eigenfunctions as positional encoding, and Coulomb matrix, which encodes atomic coordinates and charges. With a comprehensive dataset of 8,503 molecules, Mol-PECO directly achieves an area-under-the-receiver-operating-characteristic (AUROC) of 0.813 in 118 odor descriptors, superior to the machine learning of molecular fingerprints (AUROC of 0.761) and GCN of adjacency matrix (AUROC of 0.678). The learned embeddings by Mol-PECO also capture a meaningful odor space with global clustering of descriptors and local retrieval of similar odorants. Our work may promote the understanding and decoding of the olfactory sense and mechanisms.
Forward and Backward Bellman equations improve the efficiency of EM algorithm for DEC-POMDP
Mar 19, 2021
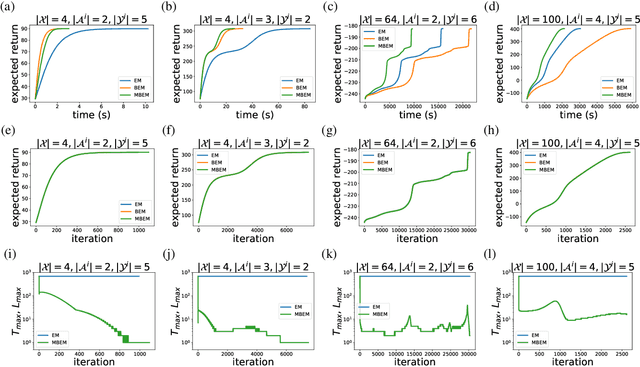
Decentralized Partially Observable Markov Decision Process (DEC-POMDP) models sequential decision making problems by a team of agents. Since the planning of DEC-POMDP can be interpreted as the maximum likelihood estimation for the latent variable model, DEC-POMDP can be solved by EM algorithm. However, in EM for DEC-POMDP, the forward-backward algorithm needs to be calculated up to the infinite horizon, which impairs the computational efficiency. In this paper, we propose Bellman EM algorithm (BEM) and Modified Bellman EM algorithm (MBEM) by introducing the forward and backward Bellman equations into EM. BEM can be more efficient than EM because BEM calculates the forward and backward Bellman equations instead of the forward-backward algorithm up to the infinite horizon. However, BEM cannot always be more efficient than EM when the size of problems is large because BEM calculates an inverse matrix. We circumvent this shortcoming in MBEM by calculating the forward and backward Bellman equations without the inverse matrix. Our numerical experiments demonstrate that the convergence of MBEM is faster than that of EM.