 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Transportation of UAVs Without Inter-UAV Communication
Nov 05, 2021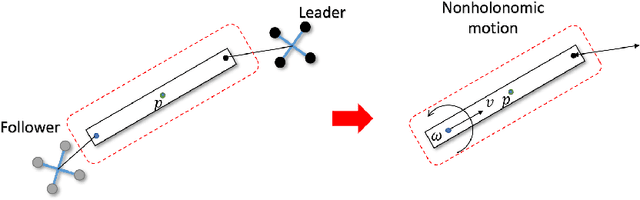
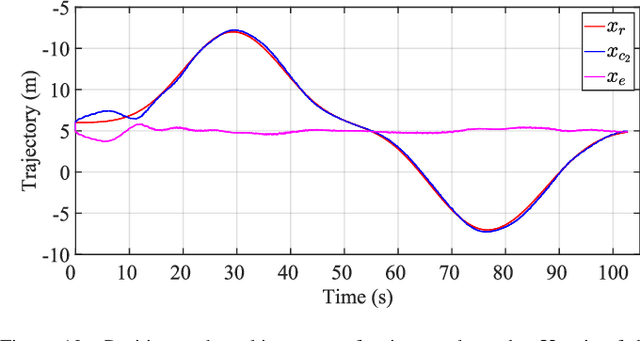
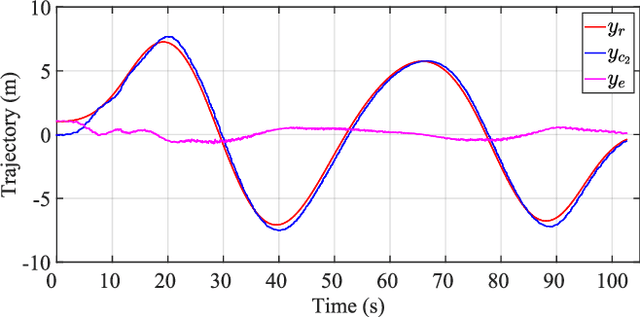
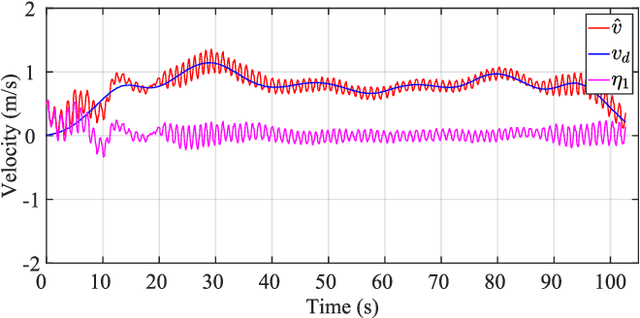
A leader-follower system is developed for cooperative transportation. To the best of our knowledge, this is the first work that inter-UAV communication is not required and the reference trajectory of the payload can be modified in real time, so that it can be applied to a dynamically changing environment. To track the modified reference trajectory in real time under the communication-free condition, the leader-follower system is considered as a nonholonomic system in which a controller is developed for the leader to achieve asymptotic tracking of the payload. To eliminate the need to install force sensors, UKFs (unscented Kalman filters) are developed to estimate the forces applied by the leader and follower. Stability analysis is conducted to prove the tracking error of the closed-loop system. Simulation results demonstrate the good performance of the tracking controller. The experiments show the controllers of the leader and the follower can work in the real world, but the tracking errors were affected by the disturbance of airflow in a restricted space.
Image-Based Multi-UAV Tracking System in a Cluttered Environment
Sep 15, 2021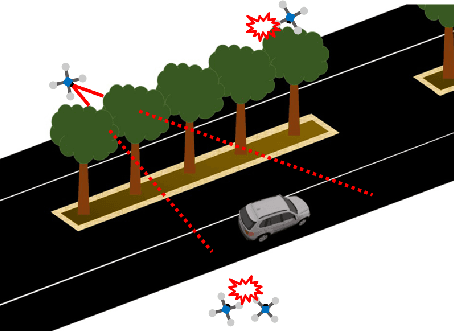
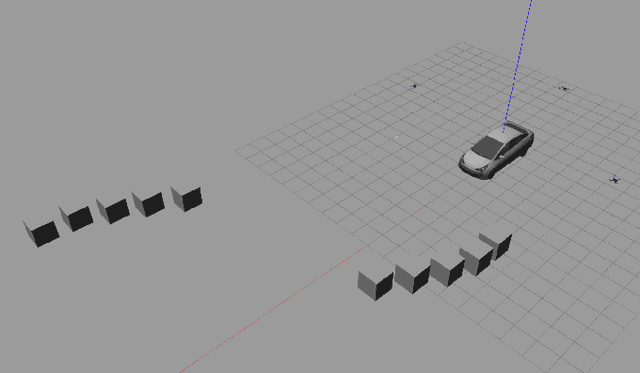
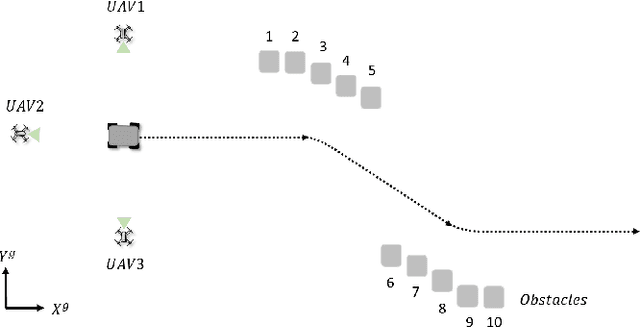
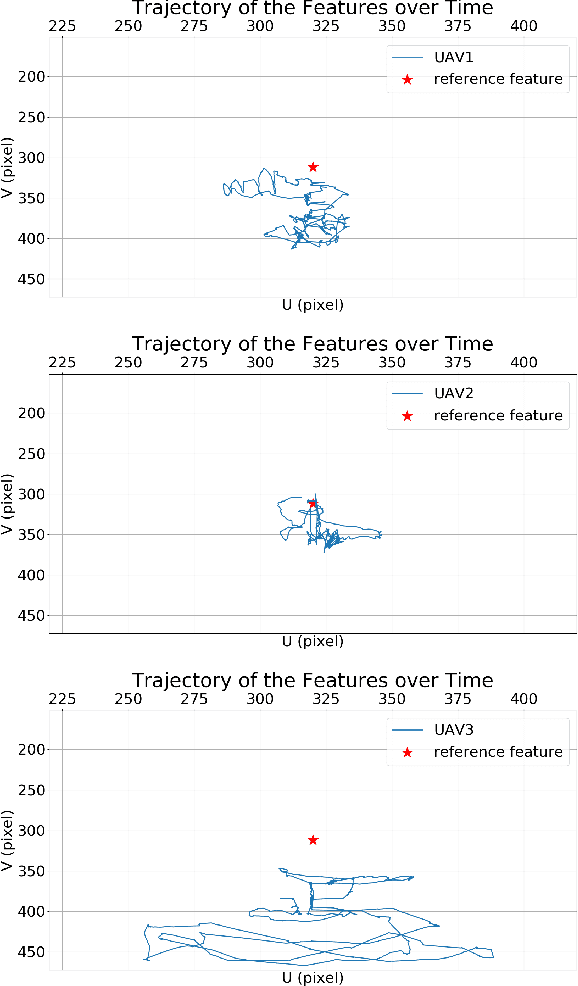
A tracking controller for unmanned aerial vehicles (UAVs) is developed to track moving targets undergoing unknown translational and rotational motions. The main challenges are to control both the relative positions and angles between the target and the UAVs to within desired values, and to guarantee that the generated control inputs to the UAVs are feasible (i.e., within their motion capabilities). Moreover, the UAVs are controlled to ensure that the target always remains within the fields of view of their onboard cameras. To the best of our knowledge, this is the first work to apply multiple UAVs to cooperatively track a dynamic target while ensuring that the UAVs remain connected and that both occlusion and collisions are avoided. To achieve these control objectives, a designed controller solved based on the aforementioned tracking controller using quadratic programming can generate minimally invasive control actions to achieve occlusion avoidance and collision avoidance. Furthermore, control barrier functions (CBFs) with a distributed design are developed in order to reduce the amount of inter-UAV communication. Simulations were performed to assess the efficacy and performance of the developed CBF-based controller for the multi-UAV system in tracking a target.
Communications and Networking Technologies for Intelligent Drone Cruisers
Sep 25, 2019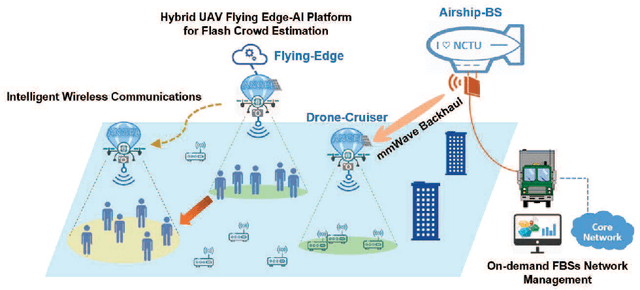
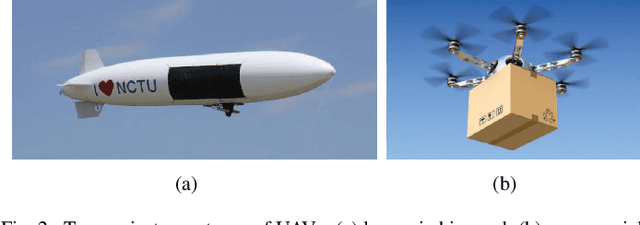

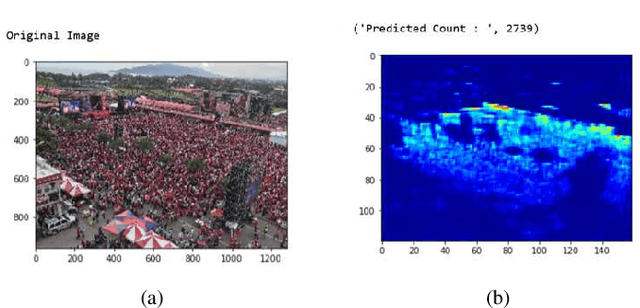
Future mobile communication networks require an Aerial Base Station (ABS) with fast mobility and long-term hovering capabilities. At present, unmanned aerial vehicles (UAV) or drones do not have long flight times and are mainly used for monitoring, surveillance, and image post-processing. On the other hand, the traditional airship is too large and not easy to take off and land. Therefore, we propose to develop an "Artificial Intelligence (AI) Drone-Cruiser" base station that can help 5G mobile communication systems and beyond quickly recover the network after a disaster and handle the instant communications by the flash crowd. The drone-cruiser base station can overcome the communications problem for three types of flash crowds, such as in stadiums, parades, and large plaza so that an appropriate number of aerial base stations can be accurately deployed to meet large and dynamic traffic demands. Artificial intelligence can solve these problems by analyzing the collected data, and then adjust the system parameters in the framework of Self-Organizing Network (SON) to achieve the goals of self-configuration, self-optimization, and self-healing. With the help of AI technologies, 5G networks can become more intelligent. This paper aims to provide a new type of service, On-Demand Aerial Base Station as a Service. This work needs to overcome the following five technical challenges: innovative design of drone-cruisers for the long-time hovering, crowd estimation and prediction, rapid 3D wireless channel learning and modeling, 3D placement of aerial base stations and the integration of WiFi front-haul and millimeter wave/WiGig back-haul networks.