 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized Pose Forecasting
Dec 06, 2023Human pose forecasting is the task of predicting articulated human motion given past human motion. There exists a number of popular benchmarks that evaluate an array of different models performing human pose forecasting. These benchmarks do not reflect that a human interacting system, such as a delivery robot, observes and plans for the motion of the same individual over an extended period of time. Every individual has unique and distinct movement patterns. This is however not reflected in existing benchmarks that evaluate a model's ability to predict an average human's motion rather than a particular individual's. We reformulate the human motion forecasting problem and present a model-agnostic personalization method. Motion forecasting personalization can be performed efficiently online by utilizing a low-parametric time-series analysis model that personalizes neural network pose predictions.
Discriminating Against Unrealistic Interpolations in Generative Adversarial Networks
Mar 02, 2022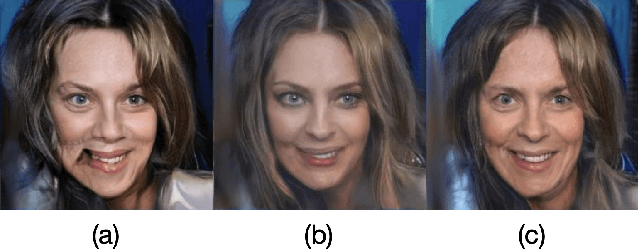
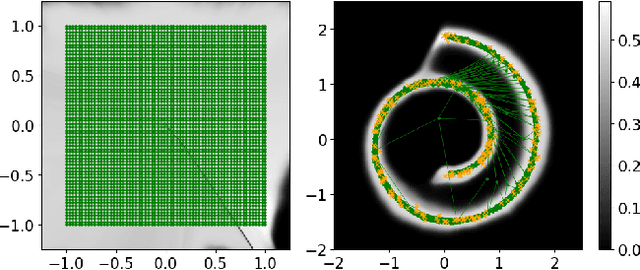
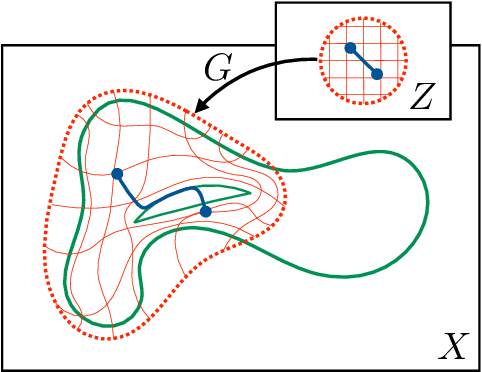
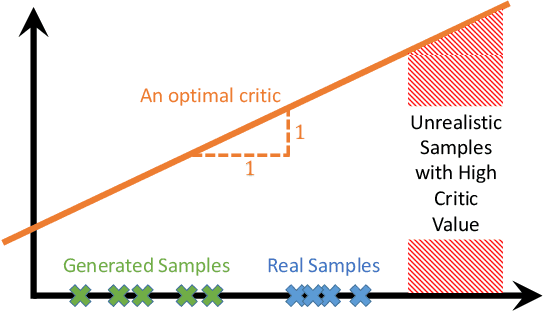
Interpolations in the latent space of deep generative models is one of the standard tools to synthesize semantically meaningful mixtures of generated samples. As the generator function is non-linear, commonly used linear interpolations in the latent space do not yield the shortest paths in the sample space, resulting in non-smooth interpolations. Recent work has therefore equipped the latent space with a suitable metric to enforce shortest paths on the manifold of generated samples. These are often, however, susceptible of veering away from the manifold of real samples, resulting in smooth but unrealistic generation that requires an additional method to assess the sample quality along paths. Generative Adversarial Networks (GANs), by construction, measure the sample quality using its discriminator network. In this paper, we establish that the discriminator can be used effectively to avoid regions of low sample quality along shortest paths. By reusing the discriminator network to modify the metric on the latent space, we propose a lightweight solution for improved interpolations in pre-trained GANs.