 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Communication-Aware Cooperative Belief Space Planning with Inconsistent Beliefs: An Action-Consistent Approach
Mar 09, 2024Multi-robot belief space planning (MR-BSP) is essential for reliable and safe autonomy. While planning, each robot maintains a belief over the state of the environment and reasons how the belief would evolve in the future for different candidate actions. Yet, existing MR-BSP works have a common assumption that the beliefs of different robots are consistent at planning time. Such an assumption is often highly unrealistic, as it requires prohibitively extensive and frequent communication capabilities. In practice, each robot may have a different belief about the state of the environment. Crucially, when the beliefs of different robots are inconsistent, state-of-the-art MR-BSP approaches could result in a lack of coordination between the robots, and in general, could yield dangerous, unsafe and sub-optimal decisions. In this paper, we tackle this crucial gap. We develop a novel decentralized algorithm that is guaranteed to find a consistent joint action. For a given robot, our algorithm reasons for action preferences about 1) its local information, 2) what it perceives about the reasoning of the other robot, and 3) what it perceives about the reasoning of itself perceived by the other robot. This algorithm finds a consistent joint action whenever these steps yield the same best joint action obtained by reasoning about action preferences; otherwise, it self-triggers communication between the robots. Experimental results show efficacy of our algorithm in comparison with two baseline algorithms.
Mobile Recharger Path Planning and Recharge Scheduling in a Multi-Robot Environment
Feb 24, 2021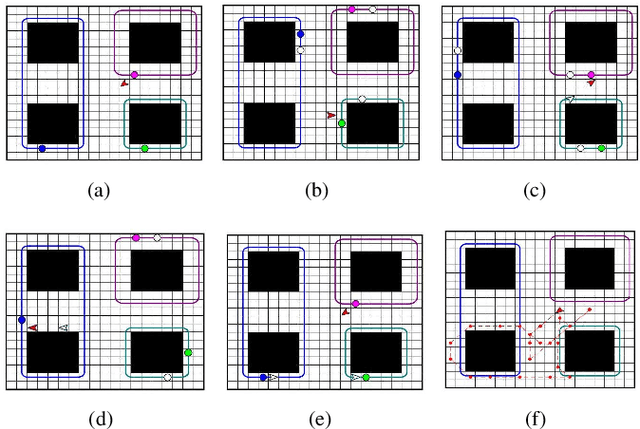
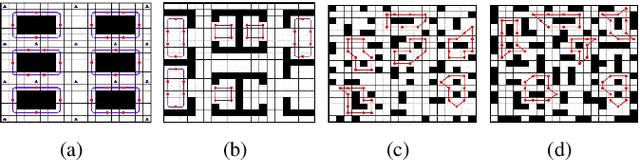
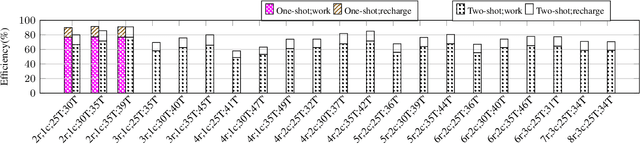
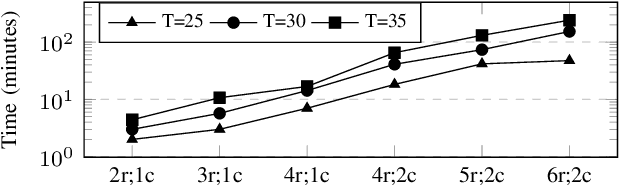
In many multi-robot applications, mobile worker robots are often engaged in performing some tasks repetitively by following pre-computed trajectories. As these robots are battery-powered, they need to get recharged at regular intervals. We envision that in the future, a few mobile recharger robots will be employed to supply charge to the energy-deficient worker robots recurrently, to keep the overall efficiency of the system optimized.In this setup, we need to find the time instants and locations for the meeting of the worker robots and recharger robots optimally. We present a Satisfiability Modulo Theory (SMT)-based approach that captures the activities of the robots in the form of constraints in a sufficiently long finite-length time window (hypercycle) whose repetitions provide their perpetual behavior. Our SMT encoding ensures that for a chosen length of the hypercycle, the total waiting time of the worker robots due to charge constraints is minimized under certain condition, and close to optimal when the condition does not hold. Moreover, the recharger robots follow the most energy-efficient trajectories. We show the efficacy of our approach by comparing it with another variant of the SMT-based method which is not scalable but provides an optimal solution globally, and with a greedy algorithm.