 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComfort-oriented driving: performance comparison between human drivers and motion planners
Jan 25, 2023Motion planning is a fundamental component in automated vehicles. It influences the comfort and time efficiency of the ride. Despite a vast collection of studies working towards improving motion comfort in self-driving cars, little attention has been paid to the performance of human drivers as a baseline. In this paper, we present an experimental study conducted on a public road using an instrumented vehicle to investigate how human drivers balance comfort and time efficiency. The human driving data is compared with two optimization-based motion planners that we developed in the past. In situations when there is no difference in travel times, human drivers incurred an average of 23.5% more energy in the longitudinal and lateral acceleration signals than the motion planner that minimizes accelerations. In terms of frequency-weighted acceleration energy, an indicator correlated with the incidence of motion sickness, the average performance deficiency rises to 70.2%. Frequency-domain analysis reveals that human drivers exhibit more longitudinal oscillations in the frequency range of 0.2-1 Hz and more lateral oscillations in the frequency range of up to 0.2 Hz. This is reflected in time-domain data features such as less smooth speed profiles and higher velocities for long turns. The performance difference also partly results from several practical matters and additional factors considered by human drivers when planning and controlling vehicle motion. The driving data collected in this study provides a performance baseline for motion planning algorithms to compare with and can be further exploited to deepen the understanding of human drivers.
Distributed IDA-PBC for a Class of Nonholonomic Mechanical Systems
Jun 24, 2021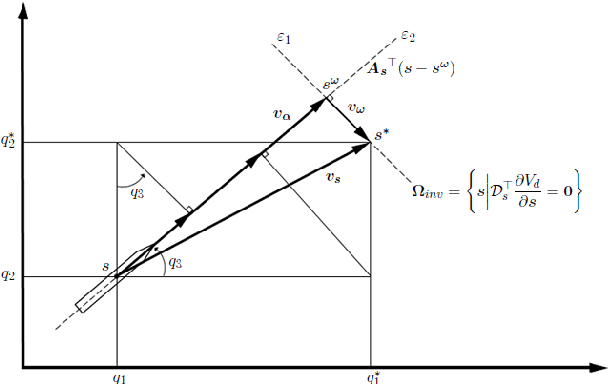
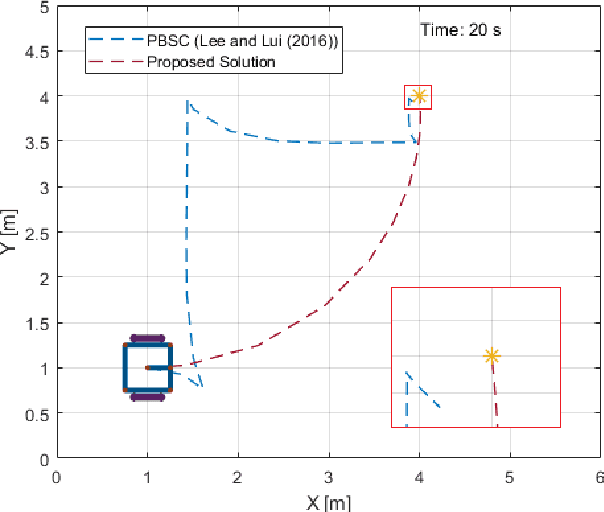
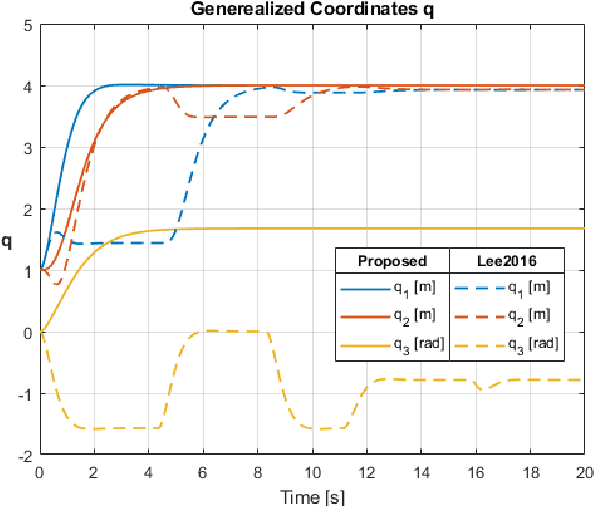
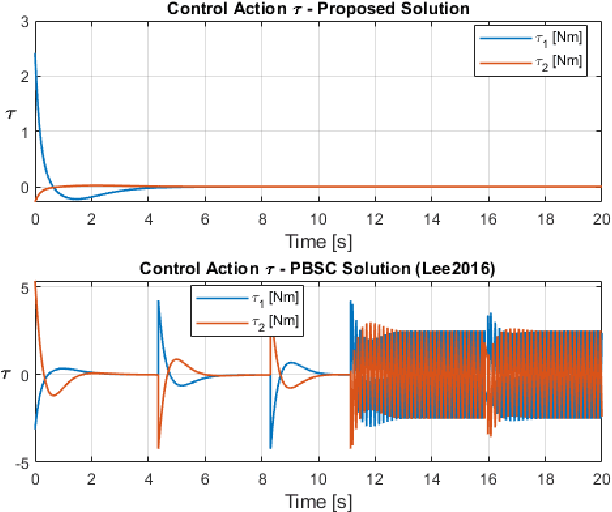
Nonholonomic mechanical systems encompass a large class of practically interesting robotic structures, such as wheeled mobile robots, space manipulators, and multi-fingered robot hands. However, few results exist on the cooperative control of such systems in a generic, distributed approach. In this work we extend a recently developed distributed Interconnection and Damping Assignment Passivity-Based Control (IDA-PBC) method to such systems. More specifically, relying on port-Hamiltonian system modelling for networks of mechanical systems, we propose a full-state stabilization control law for a class of nonholonomic systems within the framework of distributed IDA-PBC. This enables the cooperative control of heterogeneous, underactuated and nonholonomic systems with a unified control law. This control law primarily relies on the notion of Passive Configuration Decomposition (PCD) and a novel, non-smooth desired potential energy function proposed here. A low-level collision avoidance protocol is also implemented in order to achieve dynamic inter-agent collision avoidance, enhancing the practical relevance of this work. Theoretical results are tested in different simulation scenarios in order to highlight the applicability of the derived method.
A Feedback Scheme to Reorder a Multi-Agent Execution Schedule by Persistently Optimizing a Switchable Action Dependency Graph
Oct 11, 2020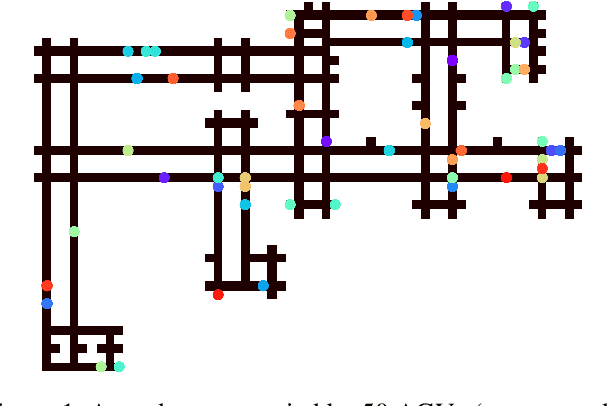
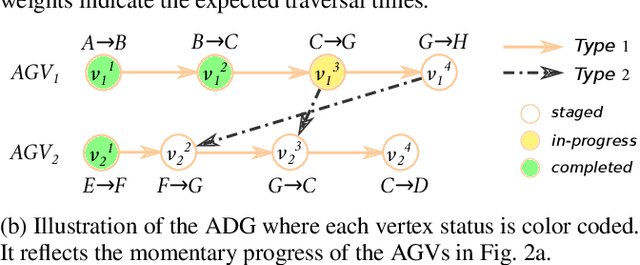
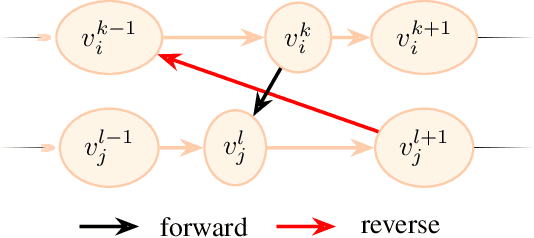
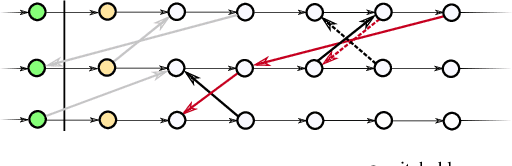
In this paper we consider multiple Automated Guided Vehicles (AGVs) navigating a common workspace to fulfill various intralogistics tasks, typically formulated as the Multi-Agent Path Finding (MAPF) problem. To keep plan execution deadlock-free, one approach is to construct an Action Dependency Graph (ADG) which encodes the ordering of AGVs as they proceed along their routes. Using this method, delayed AGVs occasionally require others to wait for them at intersections, thereby affecting the plan execution efficiency. If the workspace is shared by dynamic obstacles such as humans or third party robots, AGVs can experience large delays. A common mitigation approach is to re-solve the MAPF using the current, delayed AGV positions. However, solving the MAPF is time-consuming, making this approach inefficient, especially for large AGV teams. In this work, we present an online method to repeatedly modify a given acyclic ADG to minimize route completion times of each AGV. Our approach persistently maintains an acyclic ADG, necessary for deadlock-free plan execution. We evaluate the approach by considering simulations with random disturbances on the execution and show faster route completion times compared to the baseline ADG-based execution management approach.