 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Long-Endurance Flight of an Insect-Inspired, Tailless, Two-Winged, Flapping-Wing Flying Robot
May 14, 2020

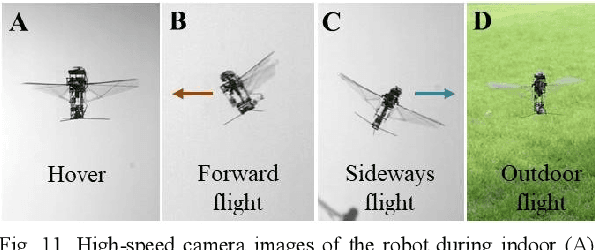
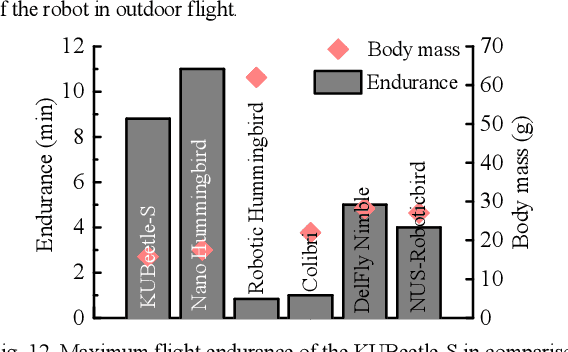
A hover-capable insect-inspired flying robot that can remain long in the air has shown its potential use for both confined indoor and outdoor applications to complete assigned tasks. In this letter, we report improvements in the flight endurance of our 15.8 g robot, named KUBeetle-S, using a low-voltage power source. The robot is equipped with a simple but effective control mechanism that can modulate the stroke plane for attitude stabilization and control. Due to the demand for extended flight, we performed a series of experiments on the lift generation and power requirement of the robot with different stroke amplitudes and wing areas. We show that a larger wing with less inboard wing area improves the lift-to-power ratio and produces a peak lift-to-weight ratio of 1.34 at 3.7 V application. Flight tests show that the robot employing the selected wing could hover for 8.8 minutes. Moreover, the robot could perform maneuvers in any direction and fly outdoors, demonstrating its ability to enter the next phase of autonomous flight.
Analysis of Stability, Response and LQR Controller Design of a Small Scale Helicopter Dynamics
Apr 30, 2008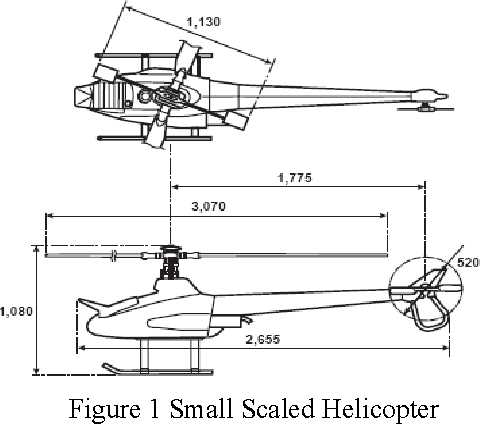
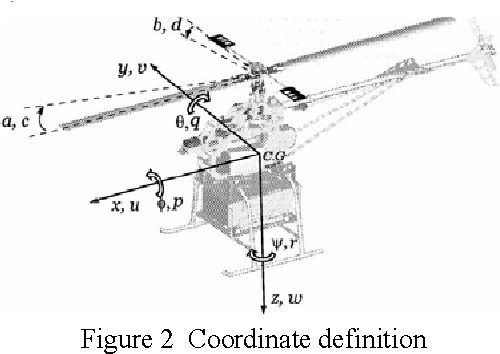

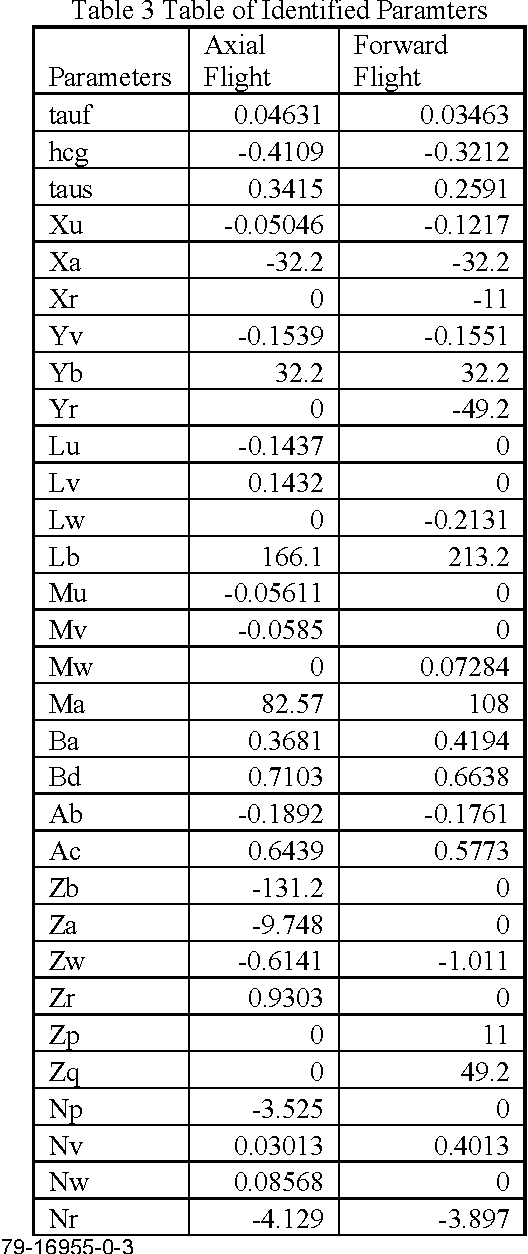
This paper presents how to use feedback controller with helicopter dynamics state space model. A simplified analysis is presented for controller design using LQR of small scale helicopters for axial and forward flights. Our approach is simple and gives the basic understanding about how to develop controller for solving the stability of linear helicopter flight dynamics.
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 8 pages, 19 figures, 4 tables