Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Stability, Response and LQR Controller Design of a Small Scale Helicopter Dynamics
Apr 30, 2008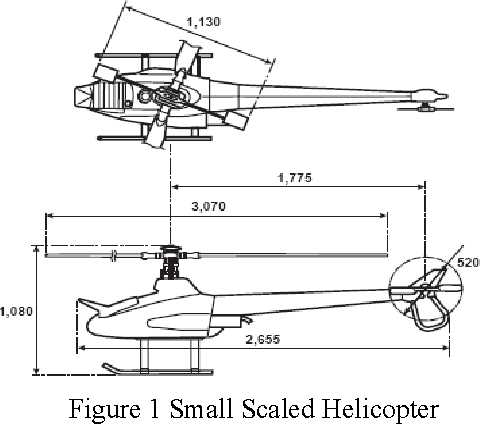
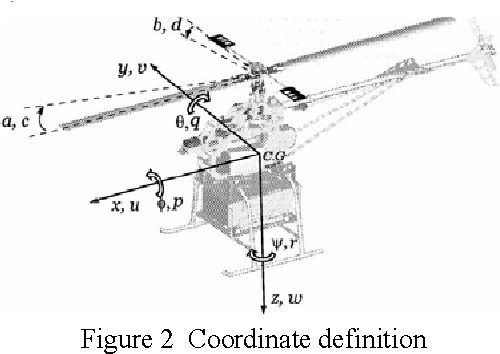

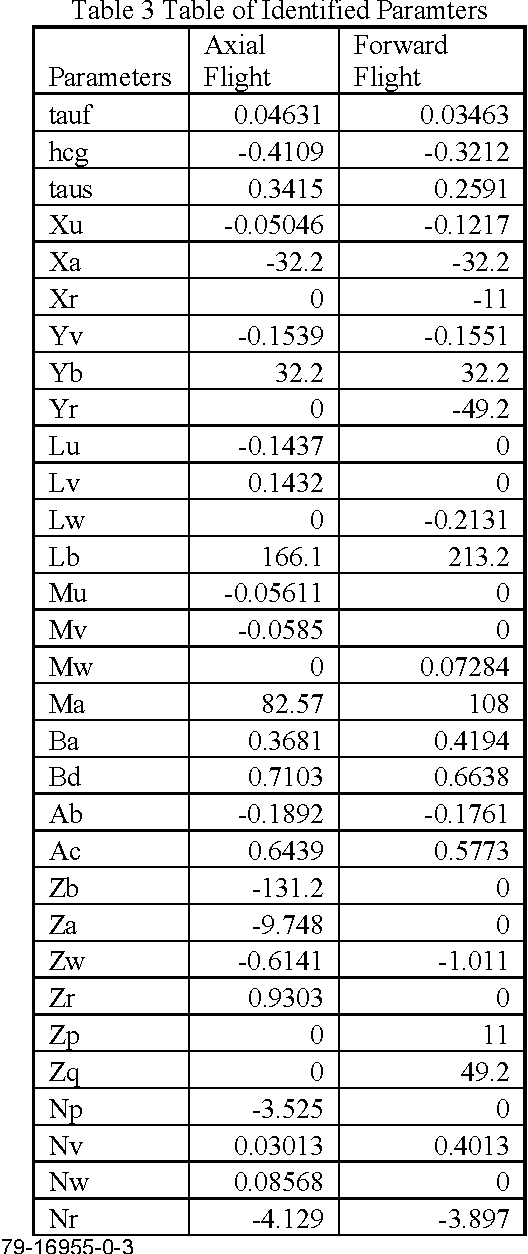
This paper presents how to use feedback controller with helicopter dynamics state space model. A simplified analysis is presented for controller design using LQR of small scale helicopters for axial and forward flights. Our approach is simple and gives the basic understanding about how to develop controller for solving the stability of linear helicopter flight dynamics.
* Proceedings of the International Conference on Intelligent
Unmanned System (ICIUS 2007), Bali, Indonesia, October 24-25, 2007, Paper No.
ICIUS2007-C006
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 8 pages, 19 figures, 4 tables
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 8 pages, 19 figures, 4 tables
Via