 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical Challenges in Landing a UAV on a Dynamic Target
Sep 28, 2022Unmanned Aerial Vehicles grow more popular by the day and applications for them are crossing boundaries of science and industry, with everything from aerial photography to package delivery to disaster management benefiting from the technology. But before they become commonplace, there are challenges to be solved to make them reliable and safe. The following paper discusses the challenges associated with the precision landing of an Unmanned Aerial Vehicle, including methods for sensing and control and their merits and shortcomings for various applications.
Precision Landing of a UAV on a Moving Platform for Outdoor Applications
Sep 28, 2022
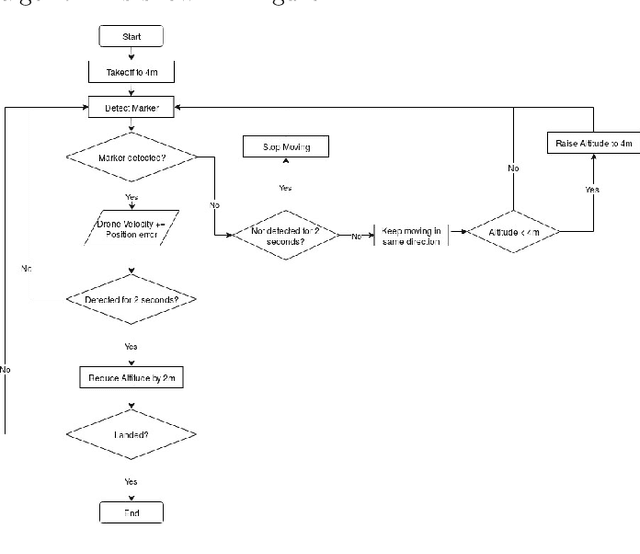
As UAV technology improves, more uses have been found for these versatile autonomous vehicles, from surveillance to aerial photography, to package delivery, and each of these applications poses unique challenges. This paper implements a solution for one such challenge: To land on a moving target. This problem has been addressed before with varying degrees of success, however, most implementations focus on indoor applications. Outdoor poses greater challenges in the form of variables such as wind and lighting, and outdoor drones are heavier and more susceptible to inertial effects. Our approach is purely vision based, using a monocular camera and fiducial markers to localize the drone and a PID control to follow and land on the platform.