 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical Challenges in Landing a UAV on a Dynamic Target
Sep 28, 2022Unmanned Aerial Vehicles grow more popular by the day and applications for them are crossing boundaries of science and industry, with everything from aerial photography to package delivery to disaster management benefiting from the technology. But before they become commonplace, there are challenges to be solved to make them reliable and safe. The following paper discusses the challenges associated with the precision landing of an Unmanned Aerial Vehicle, including methods for sensing and control and their merits and shortcomings for various applications.
Precision Landing of a UAV on a Moving Platform for Outdoor Applications
Sep 28, 2022
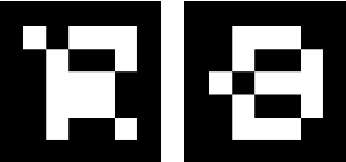
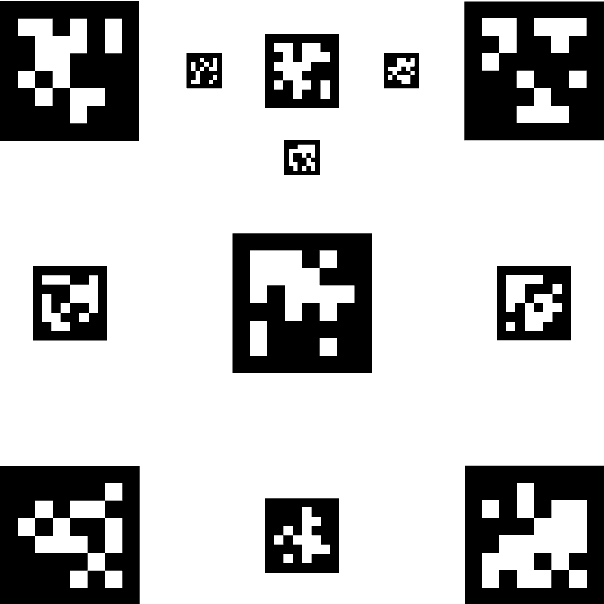
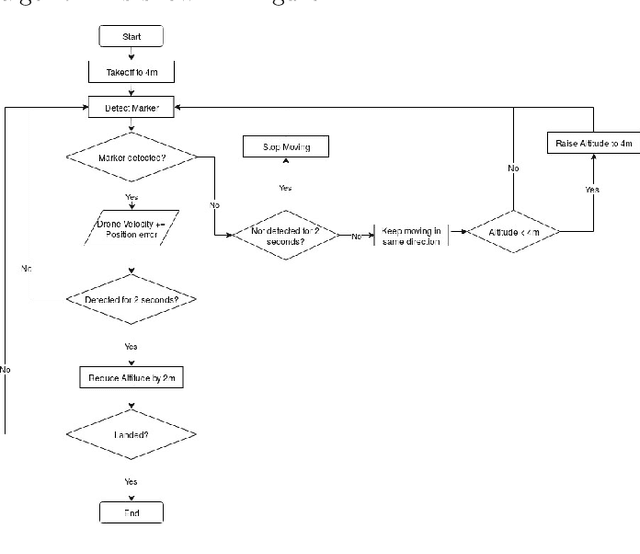
As UAV technology improves, more uses have been found for these versatile autonomous vehicles, from surveillance to aerial photography, to package delivery, and each of these applications poses unique challenges. This paper implements a solution for one such challenge: To land on a moving target. This problem has been addressed before with varying degrees of success, however, most implementations focus on indoor applications. Outdoor poses greater challenges in the form of variables such as wind and lighting, and outdoor drones are heavier and more susceptible to inertial effects. Our approach is purely vision based, using a monocular camera and fiducial markers to localize the drone and a PID control to follow and land on the platform.
Identification of Helicopter Dynamics based on Flight Data using Nature Inspired Techniques
Nov 12, 2014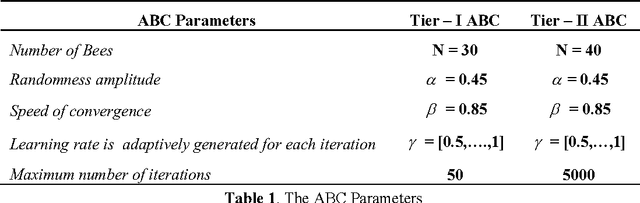
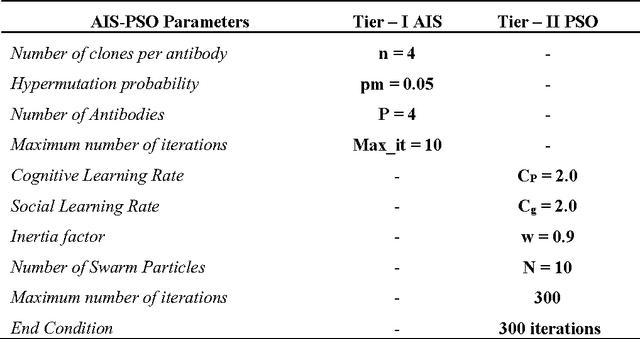
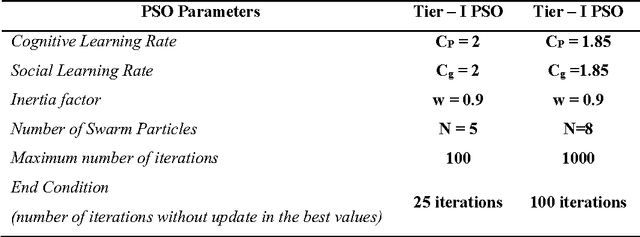
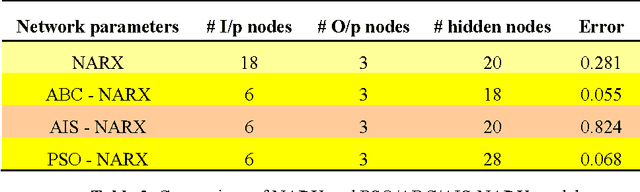
The complexity of helicopter flight dynamics makes modeling and helicopter system identification a very difficult task. Most of the traditional techniques require a model structure to be defined apriori and in case of helicopter dynamics, this is difficult due to its complexity and the interplay between various subsystems.To overcome this difficulty, non-parametric approaches are commonly adopted for helicopter system identification. Artificial Neural Network are a widely used class of algorithms for non-parametric system identification, among them, the Nonlinear Auto Regressive eXogeneous input network (NARX) model is very popular, but it also necessitates some in depth knowledge regarding the system being modeled. There have been many approaches proposed to circumvent this and yet still retain the advantageous characteristics. In this paper we carry out an extensive study of one such newly proposed approach using a modified NARX model with a two tiered, externally driven recurrent neural network architecture. This is coupled with an outer optimization routine for evolving the order of the system. This generic architecture is comprehensively explored to ascertain its usability and critically asses its potential. Different instantiations of this architecture, based on nature inspired computational techniques (Artificial Bee Colony, Artificial Immune System and Particle Swarm Optimization) are evaluated and critically compared in this paper. Simulations have been carried out for identifying the longitudinally uncoupled dynamics. Results of identification indicate a quite close correlation between the actual and the predicted response of the helicopter for all the models.