 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalized Concept Erasure for Text-to-Image Diffusion Models Using Training-Free Gated Low-Rank Adaptation
Mar 16, 2025
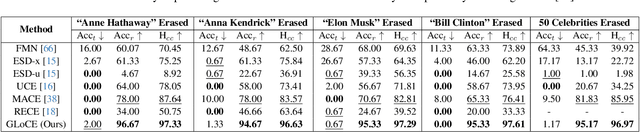

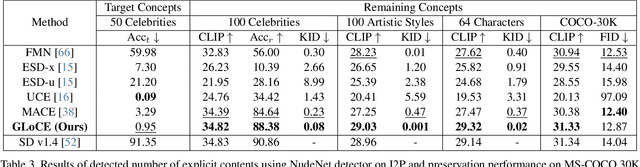
Fine-tuning based concept erasing has demonstrated promising results in preventing generation of harmful contents from text-to-image diffusion models by removing target concepts while preserving remaining concepts. To maintain the generation capability of diffusion models after concept erasure, it is necessary to remove only the image region containing the target concept when it locally appears in an image, leaving other regions intact. However, prior arts often compromise fidelity of the other image regions in order to erase the localized target concept appearing in a specific area, thereby reducing the overall performance of image generation. To address these limitations, we first introduce a framework called localized concept erasure, which allows for the deletion of only the specific area containing the target concept in the image while preserving the other regions. As a solution for the localized concept erasure, we propose a training-free approach, dubbed Gated Low-rank adaptation for Concept Erasure (GLoCE), that injects a lightweight module into the diffusion model. GLoCE consists of low-rank matrices and a simple gate, determined only by several generation steps for concepts without training. By directly applying GLoCE to image embeddings and designing the gate to activate only for target concepts, GLoCE can selectively remove only the region of the target concepts, even when target and remaining concepts coexist within an image. Extensive experiments demonstrated GLoCE not only improves the image fidelity to text prompts after erasing the localized target concepts, but also outperforms prior arts in efficacy, specificity, and robustness by large margin and can be extended to mass concept erasure.
Integrated Path Tracking with DYC and MPC using LSTM Based Tire Force Estimator for Four-wheel Independent Steering and Driving Vehicle
Dec 13, 2023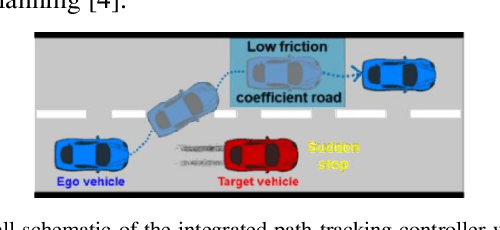
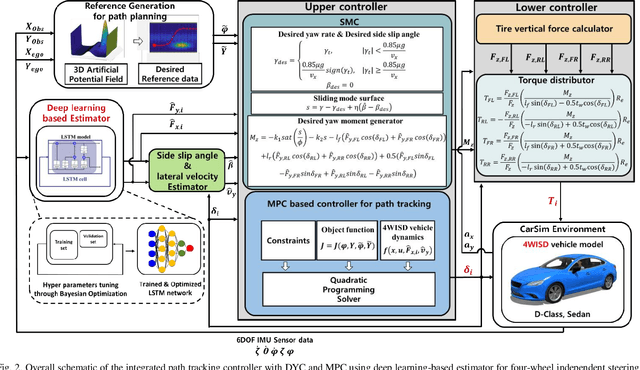
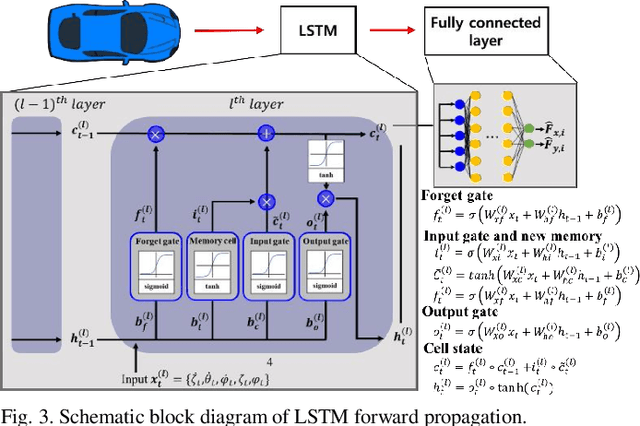
Active collision avoidance system plays a crucial role in ensuring the lateral safety of autonomous vehicles, and it is primarily related to path planning and tracking control algorithms. In particular, the direct yaw-moment control (DYC) system can significantly improve the lateral stability of a vehicle in environments with sudden changes in road conditions. In order to apply the DYC algorithm, it is very important to accurately consider the properties of tire forces with complex nonlinearity for control to ensure the lateral stability of the vehicle. In this study, longitudinal and lateral tire forces for safety path tracking were simultaneously estimated using a long short-term memory (LSTM) neural network based estimator. Furthermore, to improve path tracking performance in case of sudden changes in road conditions, a system has been developed by combining 4-wheel independent steering (4WIS) model predictive control (MPC) and 4-wheel independent drive (4WID) direct yaw-moment control (DYC). The estimation performance of the extended Kalman filter (EKF), which are commonly used for tire force estimation, was compared. In addition, the estimated longitudinal and lateral tire forces of each wheel were applied to the proposed system, and system verification was performed through simulation using a vehicle dynamics simulator. Consequently, the proposed method, the integrated path tracking algorithm with DYC and MPC using the LSTM based estimator, was validated to significantly improve the vehicle stability in suddenly changing road conditions.